Buck Converter - גודל רכיבים
מאמר זה ייתן את ההליך לחישוב ובחירת הרכיבים הדרושים לתכנון קטע הספק של ממיר DC מוריד מטה, טופולוגיה של ממיר באק מבודד גלווני. ממירים של טופולוגיה זו מתאימים למתחי DC בטווח של 50 וולט בכניסה ובהספקי עומס שאינם עולים על 100 וואט.
כל מה שנוגע לבחירת הבקר ומעגל הדרייבר, כמו גם סוג טרנזיסטור אפקט שדה, יישאר מחוץ לתחום המאמר הזה, אך ננתח בפירוט את המעגל ואת המאפיינים של מצבי הפעולה של כל אחד מהם. של המרכיבים העיקריים של חלק הכוח של ממירים מסוג זה.

התחל בפיתוח ממיר דופק, קח בחשבון את הנתונים הראשוניים הבאים: ערכי מתח הכניסה והמוצא, זרם העומס הקבוע המרבי, תדירות המיתוג של טרנזיסטור הכוח (תדירות הפעולה של הממיר), כמו גם גל הזרם דרך המשנק. נתונים אלה, חשבו השראות חנק, אשר יספק את הפרמטרים הדרושים, את הקיבולת של קבל הפלט, כמו גם את המאפיינים של דיודה הפוכה.
-
מתח כניסה - Uin, V
-
מתח מוצא - Uout, V
-
זרם עומס מרבי - Iout, A
-
טווח של זרם אדוות דרך המשנק - Idr, A
-
תדר מיתוג של טרנזיסטורים - f, kHz
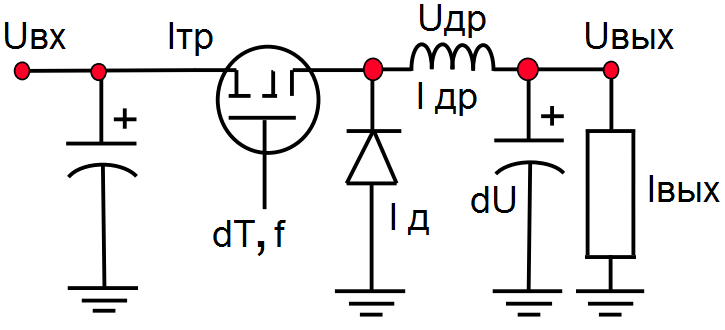
הממיר פועל באופן הבא. במהלך החלק הראשון של התקופה שבה הטרנזיסטור סגור, זרם מסופק ממקור הכוח העיקרי דרך המשרן לעומס בזמן שקבל מסנן המוצא נטען. כאשר הטרנזיסטור פתוח, זרם העומס נשמר על ידי מטען הקבל וזרם המשרן, שאינם ניתנים להפסקה מידית, ונסגר על ידי הדיודה ההפוכה, הפתוחה כעת במהלך החלק השני של התקופה.
לדוגמה, נניח שעלינו לפתח טופולוגיה של ממיר באק המופעל על ידי מתח קבוע של 24 וולט, וביציאה אנו צריכים לקבל 12 וולט עם זרם עומס נקוב של 1 אמפר וכך המתח יפלס בשעה הפלט אינו עולה על 50 mV. תן לתדר ההפעלה של הממיר להיות 450 קילו-הרץ, ואדוות הזרם דרך המשרן לא יעלו על 30% מזרם העומס המרבי.
נתונים ראשוניים:
-
Uin = 24 V
-
Uout = 12V
-
אני יוצא = 1 א'.
-
I dr = 0.3 * 1 A = 0.3 A
-
f = 450 קילו-הרץ
מכיוון שאנו מדברים על ממיר פולסים, במהלך פעולתו המתח לא יופעל כל הזמן על המשנק, הוא יופעל במדויק על ידי פולסים, את משך החלקים החיוביים שבהם ניתן לחשב את dT על סמך תדירות הפעולה של ה- ממיר והיחס בין מתח הכניסה והמוצא לפי הנוסחה הבאה:
dT = Uout / (Uin * f),
כאשר Uout / Uin = DC הוא מחזור העבודה של דופק בקרת הטרנזיסטור.
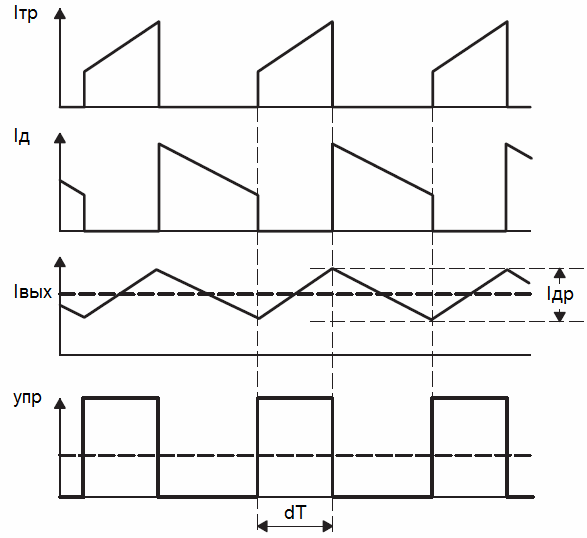
במהלך החלק החיובי של דופק המיתוג, המקור מפעיל את מעגל הממיר, במהלך החלק השלילי של הדופק, האנרגיה הנאגרת על ידי המשרן מועברת למעגל המוצא.
לדוגמא שלנו, מתברר: dT = 1.11 μs - הזמן שבו מתח הכניסה פועל על המשרן עם הקבל והעומס המחובר אליו במהלך החלק החיובי של הדופק.
לפי עם חוק האינדוקציה האלקטרומגנטית, השינוי בזרם Idr דרך המשרן L (שהוא המשנק) יהיה פרופורציונלי למתח Udr המופעל על המסופים של הסליל ולזמן היישום שלו dT (משך החלק החיובי של הדופק):
Udr = L * Idr / dT
מתח החנק Udr - במקרה זה לא יותר מההבדל בין מתחי הכניסה והמוצא במהלך אותו חלק של התקופה שבה הטרנזיסטור נמצא במצב מוליך:
Udr = Uin-Uout
ולדוגמה שלנו מתברר: Udr = 24 - 12 = 12 V - משרעת המתח המופעל על המשנק במהלך החלק החיובי של דופק ההפעלה.
מַצעֶרֶת

כעת, בידיעה של גודל המתח המופעל על המשנק Udr, קביעת הזמן של דופק ההפעלה dT על המשנק, כמו גם את הערך של אדווה הזרם המקסימלית המותרת של המשנק Idr, נוכל לחשב את השראות המשנק הנדרשת L :
L = Udr * dT / Idr
לדוגמא שלנו, מתברר: L = 44.4 μH - השראות המינימלית של משנק העבודה, שבאמצעותה, במשך זמן נתון של החלק החיובי של דופק הבקרה dT, התנופה של הגל לא תעלה על Idr.
מַעֲבֶה
כאשר ערך השראות של המשנק נקבע, המשך לבחירת הקיבול של קבל המוצא של המסנן. זרם האדוות דרך הקבל שווה לזרם האדוות דרך המשרן. לכן, בהזניח את ההתנגדות של המוליך השראות ואת השראות של הקבל, אנו משתמשים בנוסחה הבאה כדי למצוא את הקיבול המינימלי הנדרש של הקבל:
C = dT * Idr / dU,
כאשר dU הוא אדוות המתח על פני הקבל.
אם לוקחים את הערך של גל המתח בקבל שווה ל-dU = 0.050 V, לדוגמה שלנו נקבל C = 6.66 μF - הקיבול המינימלי של קבל המוצא של המסנן.
דיודה

לבסוף, נותר לקבוע את הפרמטרים של דיודת העבודה. הזרם זורם דרך הדיודה כאשר מתח הכניסה מנותק מהמשרן, כלומר בחלק השני של דופק ההפעלה:
Id = (1 -DC) * Iout - זרם ממוצע דרך הדיודה כשהיא פתוחה ומוליך.
לדוגמא שלנו Id = (1 -Uout / Uin) * Iout = 0.5 A — אתה יכול לבחור דיודת Schottky עבור זרם של 1 A עם מתח הפוך מרבי גדול מהקלט, כלומר, בערך 30 וולט.