עקרון הפעולה והמכשיר של המנוע החשמלי
כל מנוע חשמלי נועד לבצע עבודה מכנית עקב צריכת החשמל המופעלת עליו, המומרת בדרך כלל לתנועה סיבובית. אמנם בטכנולוגיה יש מודלים שיוצרים מיד תנועה תרגום של הגוף העובד. אלה נקראים מנועים לינאריים.
במתקנים תעשייתיים, מנועים חשמליים מניעים מכונות שונות לחיתוך מתכות והתקנים מכניים המעורבים בתהליך הייצור הטכנולוגי.
בתוך מכשירי חשמל ביתיים, מנועים חשמליים מפעילים מכונות כביסה, שואבי אבק, מחשבים, מייבשי שיער, צעצועים לילדים, שעונים ומכשירים רבים אחרים.

תהליכים פיזיקליים בסיסיים ועקרון הפעולה
כשעוברים פנימה שדה מגנטי למטענים חשמליים, הנקראים זרמים חשמליים, יש תמיד כוח מכני שנוטה להסיט את כיוונם במישור המאונך לכיוון קווי השדה המגנטי.כאשר זרם חשמלי עובר דרך חוט מתכת או סליל העשוי ממנו, כוח זה נוטה להזיז/לסובב כל חוט נושא זרם ואת הסליל כולו בכללותו.
התמונה למטה מציגה מסגרת מתכת עם זרם זורם דרכה. שדה מגנטי המופעל עליו יוצר כוח F עבור כל ענף של המסגרת, מה שיוצר תנועה סיבובית.

תכונה זו של אינטראקציה של אנרגיה חשמלית ומגנטית, המבוססת על יצירת כוח אלקטרו-מוטיבי בלולאת הולכה סגורה, מופעלת על כל מנוע חשמלי. העיצוב שלו כולל:
-
סליל שדרכו זורם זרם חשמלי. הוא ממוקם על ליבת עוגן מיוחדת ומקובע במיסבים סיבוביים כדי להפחית את ההתנגדות לכוחות חיכוך. עיצוב זה נקרא רוטור;
-
סטטור, היוצר שדה מגנטי, אשר בקווי הכוח שלו חודר מטענים חשמליים העוברים לאורך הסיבובים של פיתול הרוטור;
-
דיור להצבת סטטור. בתוך הגוף מיוצרים מושבים מיוחדים שבתוכם מותקנים הכלובים החיצוניים של מיסבי הרוטור.
העיצוב הפשוט של המנוע החשמלי הפשוט ביותר יכול להיות מיוצג על ידי תמונה של הטופס הבא.

כאשר הרוטור מסתובב, נוצר מומנט, שעוצמתו תלויה בעיצוב הכללי של המכשיר, בכמות האנרגיה החשמלית המופעלת וההפסדים שלה במהלך ההמרות.
גודל כוח המומנט המרבי האפשרי של המנוע תמיד קטן מהאנרגיה החשמלית המופעלת עליו. הוא מאופיין בערך היעילות.
סוגי מנועים חשמליים
לפי סוג הזרם הזורם דרך הסלילים, הם מחולקים למנועי DC או AC.לכל אחת משתי הקבוצות הללו יש מספר רב של שינויים תוך שימוש בתהליכים טכנולוגיים שונים.
מנועי DC
יש להם שדה מגנטי סטטור שנוצר על ידי קבוע נייח מגנטים קבועים או אלקטרומגנטים מיוחדים עם סלילי עירור. סליל האבזור מותקן בחוזקה בפיר, המקובע במיסבים ויכול להסתובב בחופשיות סביב הציר שלו.
המבנה הבסיסי של מנוע כזה מוצג באיור.

על ליבת האבזור, העשוי מחומרים פרומגנטיים, יש סליל המורכב משני חלקים המחוברים בסדרה, המחוברים ללוחות הקולטים המוליכים בקצה אחד ומחוברים זה לזה בקצה השני. שתי מברשות גרפיט ממוקמות בקצוות מנוגדים בקוטר של האבזור ונלחצות כנגד כריות המגע של לוחות האספן.
פוטנציאל מקור DC חיובי מופעל על מברשת התבנית התחתונה ופוטנציאל שלילי על העליונה. כיוון הזרם הזורם דרך הסליל מוצג על ידי חץ אדום מקווקו.
הזרם גורם לשדה המגנטי להיות בעל קוטב צפוני בחלק השמאלי התחתון של האבזור, וקוטב דרומי בחלק הימני העליון של האבזור (כלל גימבל). זה גורם לדחייה של קטבי הרוטור מהנייחים בעלי אותו שם ומשיכה לקטבים המנוגדים של הסטטור. כתוצאה מהכוח המופעל, מתרחשת תנועה סיבובית, שכיוונה מצוין על ידי חץ חום.
עם סיבוב נוסף של האבזור על ידי אינרציה, הקטבים מועברים ללוחות אספנים אחרים. כיוון הזרם בהם הפוך. הרוטור ממשיך להסתובב עוד יותר.
העיצוב הפשוט של מכשיר אספן כזה מוביל לאובדן גדול של אנרגיה חשמלית.מנועים כאלה עובדים במכשירים בעלי עיצוב פשוט או צעצועים לילדים.
למנועי הזרם החשמלי המעורבים בתהליך הייצור יש עיצוב מורכב יותר:
-
הסליל מחולק לא לשניים, אלא למספר חלקים;
-
כל חלק של הסליל מותקן על המוט שלו;
-
מכשיר האספן עשוי עם מספר מסוים של רפידות מגע בהתאם למספר הפיתולים.
כתוצאה מכך נוצר חיבור חלק של כל עמוד דרך לוחות המגע שלו למברשות ולמקור הזרם ומצטמצמים הפסדי אנרגיה.
המכשיר של עוגן כזה מוצג בתמונה.
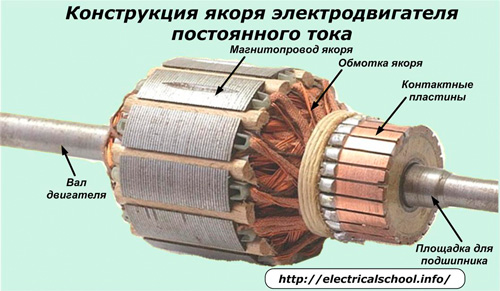
במנועי DC, ניתן להפוך את כיוון הסיבוב של הרוטור. כדי לעשות זאת, די לשנות את תנועת הזרם בסליל להיפך על ידי שינוי הקוטביות במקור.
מנועי AC
הם שונים מעיצובים קודמים בכך שהזרם החשמלי הזורם בסליל שלהם מתואר על ידי חוק הרמוני סינוסואידימעת לעת משנה את הכיוון שלו (סימן). כדי להפעיל אותם, מתח מסופק מגנרטורים עם סימנים מתחלפים.
הסטטור של מנועים כאלה מבוצע על ידי מעגל מגנטי. הוא עשוי מלוחות פרומגנטיים עם חריצים שבהם ממוקמים סיבובי הסליל עם תצורת מסגרת (סליל).

מנועים חשמליים סינכרוניים
התמונה למטה מציגה את עקרון הפעולה של מנוע AC חד פאזי עם סיבוב סינכרוני של השדות האלקטרומגנטיים של הרוטור והסטטור.

בחריצים של המעגל המגנטי של הסטטור בקצוות מנוגדים בצורה דימטרית, ממוקמים חוטים מתפתלים, המוצגים באופן סכמטי בצורה של מסגרת שדרכה זורם זרם חילופין.
הבה נבחן את המקרה של הרגע בזמן המתאים למעבר של החלק החיובי של חצי הגל שלו.
בתאים הנושאים, רוטור עם מגנט קבוע מובנה מסתובב בחופשיות, שבו הפה הצפוני "N" והפתח ה-S הדרומי של המוט מוגדרים בבירור. כאשר חצי גל חיובי של זרם זורם דרך פיתול הסטטור, נוצר בו שדה מגנטי עם קטבים «S st» ו- «N st».
נוצרים כוחות אינטראקציה בין השדות המגנטיים של הרוטור והסטטור (כאשר הקטבים דוחים ובניגוד לקטבים מושכים) אשר נוטים להפוך את אבזור המנוע מכל עמדה לקיצוניות כאשר הקטבים המנוגדים ממוקמים קרוב ככל האפשר אחד לשני. אַחֵר.
אם ניקח בחשבון את אותו מקרה, אבל לרגע בזמן שבו ההפך - חצי גל שלילי של זרם עובר דרך חוט המסגרת, אז הסיבוב של האבזור יתרחש בכיוון ההפוך.
כדי להבטיח תנועה רציפה של הרוטור בסטטור, לא נוצרת מסגרת מתפתלת אחת, אלא מספר מסוים מהם, בהתחשב בכך שכל אחד מהם מופעל על ידי מקור זרם נפרד.
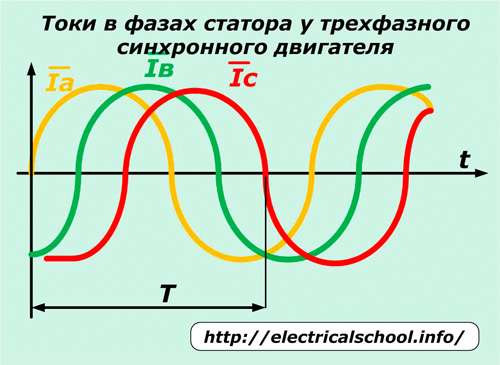
עקרון העבודה של מנוע AC תלת פאזי עם סיבוב סינכרוני, השדות האלקטרומגנטיים של הרוטור והסטטור מוצגים בתמונה הבאה.

בתכנון זה, שלושה סלילים A, B ו-C מותקנים בתוך המעגל המגנטי של הסטטור, מקוזזים בזוויות של 120 מעלות זו לזו. סליל A מסומן בצהוב, B הוא ירוק ו-C אדום. כל סליל עשוי עם אותן מסגרות כמו במקרה הקודם.
בתמונה, בכל מקרה, הזרם זורם דרך סליל אחד בלבד בכיוון קדימה או אחורה, אשר מצוין על ידי הסימנים «+» ו- «-«.
כאשר חצי הגל החיובי עובר דרך שלב A בכיוון קדימה, ציר שדה הרוטור תופס מיקום אופקי, מכיוון שהקטבים המגנטיים של הסטטור נוצרים במישור זה ומושכים את האבזור הנעים. הקטבים המנוגדים של הרוטור נוטים להתקרב לקטבים של הסטטור.
כאשר חצי הגל החיובי נכנס לשלב C, האבזור יסתובב 60 מעלות בכיוון השעון. לאחר הפעלת זרם על שלב B, סיבוב אבזור דומה יתרחש. כל זרימת זרם עוקבת בשלב הבא של הפיתול הבא תהפוך את הרוטור.
אם מתח רשת תלת פאזי המוזז בזווית של 120 מעלות מופעל על כל פיתול, אזי יסתובבו בהם זרמים מתחלפים, אשר יסובבו את האבזור ויצרו את הסיבוב הסינכרוני שלו עם השדה האלקטרומגנטי המופעל.
אותו עיצוב מכני משמש בהצלחה במנוע צעד תלת פאזי... רק בכל סלילה על ידי בקרה בקר מיוחד (נהג מנוע צעד) פולסים קבועים מופעלים ומוסרים בהתאם לאלגוריתם המתואר לעיל.
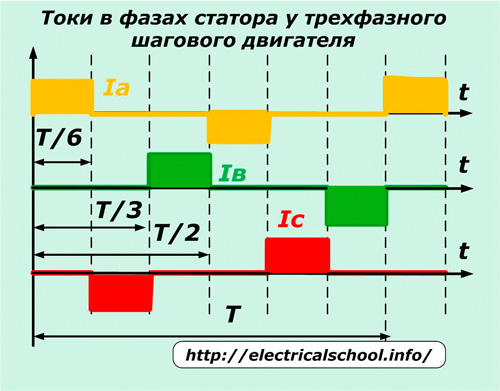
ההתנעה שלהם מתחילה תנועה סיבובית, והסיום שלהם בנקודת זמן מסוימת מספק סיבוב מדוד של הציר ועצירה בזווית מתוכנתת לביצוע פעולות טכנולוגיות מסוימות.
בשתי המערכות התלת פאזיות המתוארות, ניתן לשנות את כיוון הסיבוב של האבזור. כדי לעשות זאת, אתה רק צריך לשנות את רצף השלבים «A» — «B» — «C» לאחר, למשל «A» — «C» — «B».
מהירות הרוטור מווסתת על ידי אורך התקופה T. הקטנתו מובילה להאצה של הסיבוב.גודל משרעת הזרם בשלב תלוי בהתנגדות הפנימית של הפיתול ובערך המתח המופעל עליו. הוא קובע את כמות המומנט והכוח של המנוע החשמלי.
מנועים אסינכרוניים
לעיצובי מנוע אלה יש אותו מעגל מגנטי סטטור עם פיתולים כמו בדגמים החד-פאזיים והתלת-פאזיים שנדונו קודם לכן. הם מקבלים את שמם מהסיבוב האסינכרוני של השדות האלקטרומגנטיים של האבזור והסטטור. זה נעשה על ידי שיפור תצורת הרוטור.
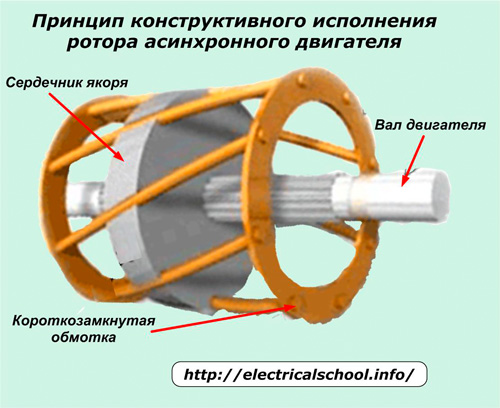
הליבה שלו עשויה לוחות פלדה חשמליים מחורצים. הם מצוידים במוליכי זרם אלומיניום או נחושת, אשר סגורים בקצות האבזור עם טבעות מוליכות.
כאשר מתח מופעל על פיתולי הסטטור, זרם חשמלי מושרה בפיתול הרוטור על ידי כוח אלקטרו-מוטורי ונוצר שדה מגנטי של אבזור. כאשר השדות האלקטרומגנטיים הללו מקיימים אינטראקציה, ציר המנוע מתחיל להסתובב.
עם עיצוב זה, תנועת הרוטור אפשרית רק לאחר התרחשות של שדה אלקטרומגנטי מסתובב בסטטור, והוא ממשיך במצב פעולה אסינכרוני איתו.
מנועים אסינכרוניים הם פשוטים יותר בעיצובם ולכן הם זולים יותר ונמצאים בשימוש נרחב במתקנים תעשייתיים ובמכשירי חשמל ביתיים.

מנוע חשמלי חסין פיצוץ ABB
מנועים לינאריים
גופים עובדים רבים של מנגנונים תעשייתיים מבצעים תנועה הדדית או תרגום במישור אחד, הנחוצה להפעלת מכונות לעיבוד מתכת, כלי רכב, מכות פטיש בעת הנעת כלונסאות ...
הזזת גוף עובד כזה באמצעות תיבות הילוכים, ברגים כדוריים, כונני רצועות והתקנים מכניים דומים ממנוע חשמלי סיבובי מסבך את התכנון. הפתרון הטכני המודרני לבעיה זו הוא פעולתו של מנוע חשמלי ליניארי.
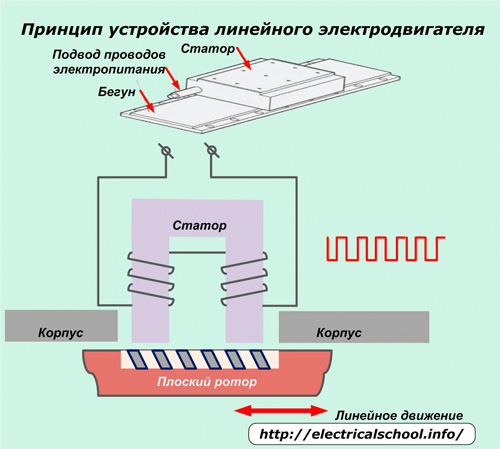
הסטטור והרוטור שלו מוארכים בצורה של רצועות, ולא פתולים לטבעות, כמו במנועים חשמליים סיבוביים.
עקרון הפעולה הוא הקניית תנועה ליניארית הדדית לרוטור הרץ עקב העברת אנרגיה אלקטרומגנטית מסטאטור נייח עם מעגל מגנטי פתוח באורך מסוים. שדה מגנטי עובד נוצר בתוכו על ידי הפעלת הזרם ברצף.
זה פועל על האבזור המתפתל עם אספן. הכוחות הנוצרים במנוע כזה מזיזים את הרוטור רק בכיוון ליניארי לאורך רכיבי ההנחיה.
מנועים לינאריים מתוכננים לפעול על זרם ישר או זרם חילופין ויכולים לפעול במצב סינכרוני או אסינכרוני.
החסרונות של מנועים לינאריים הם:
-
מורכבות הטכנולוגיה;
-
מחיר גבוה;
-
יעילות אנרגטית נמוכה.