עומסים סטטיים על מנגנוני המנוף הראשיים
ניתן לחשב את הכוח והמומנט של פיר המנוע של מנוף המנוף במצב סטטי של הרמת העומס על ידי הנוסחאות
כאשר P הוא הספק ציר המנוע, קילוואט; G הוא הכוח הנדרש להרמת המטען, N; G0 - כוח הרמה של מתקן האחיזה, N; M הוא מומנט פיר המנוע, Nm; v היא מהירות הרמת העומס, m/s; D הוא קוטר תוף כננת הגרירה, m; η - יעילות מנגנון ההרמה; i הוא יחס ההילוכים של תיבת ההילוכים ומנוף השרשרת.
במצב ירידה, מנוע העגורן מפתח הספק השווה להפרש בין כוח החיכוך Ptr לבין ההספק עקב פעולת המשקל של העומס היורד Pgr:
בהורדת עומסים בינוניים וכבדים מופנית אנרגיה מציר ההילוכים למנוע בגלל Pgr >> Ptr (שחרור בלם). במקרה זה, הספק ציר המנוע, קילוואט, יבוא לידי ביטוי בנוסחה

בעת הורדת עומסים קלים או וו ריק, ייתכנו מקרים שבהם Pgr < Ptr.במקרה זה, המנוע עובד עם רגע של תנועה (ירידה בכוח) ומפתח הספק, קילוואט,

בהתבסס על הנוסחאות הנתונות, ניתן לקבוע את הספק של מנוע המנוף בכל עומס על הקרס. בעת החישוב, יש לזכור כי יעילות המנגנון תלויה בעומס שלו (איור 1).
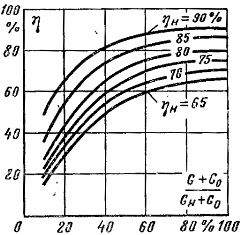
אורז. 1. תלות ביעילות המנגנון בעומס.
ניתן לקבוע את הכוח והמומנט על פיר המנועים של המנגנונים האופקיים של תנועת העגורן במצב פעולה סטטי על ידי הנוסחאות

כאשר P הוא כוח גל המנוע של מנגנון תנועת העגורן, קילוואט; M הוא מומנט פיר המנוע של מנגנון התנועה, Nm; G - משקל מטען מועבר, N; G1 - משקל עצמי של מנגנון התנועה, N; v - מהירות תנועה, m/s; R הוא רדיוס הגלגל, m; r הוא רדיוס הצוואר של ציר הגלגל, m; μ - מקדם חיכוך החלקה (μ = 0.08-0.12); f - מקדם חיכוך מתגלגל, מ' (f = 0.0005 - 0.001 מ'); η - יעילות מנגנון התנועה; k - מקדם המביא בחשבון את החיכוך של אוגני הגלגלים על המסילות; i - יחס העברה של מפחית המרכב התחתונה.
במספר מנגנוני הרמה והובלה, התנועה אינה מתבצעת בכיוון אופקי. אפשרית גם השפעת עומס רוח וכו'. הנוסחה לקביעת העוצמה במקרה זה יכולה להיות מיוצגת כ

מסומן בנוסף: α - זווית הנטייה של המדריכים למישור האופקי; F - עומס רוח ספציפי, N / m2; S הוא השטח שעליו פועל לחץ הרוח בזווית של 90 מעלות, מ"ר.
בנוסחה האחרונה, המונח הראשון מאפיין את כוח גל המנוע הנדרש כדי להתגבר על החיכוך במהלך תנועה אופקית; האיבר השני מתאים לכוח ההרמה, השלישי הוא מרכיב הכוח מעומס הרוח.
למספר מנופים יש פטיפון עליו נמצא ציוד העבודה. תנועת הפלטפורמה מועברת דרך גלגל שיניים (פטפון) שעליו מותקן קוטר Dkp. בין הפלטפורמה לבסיס הקבוע יש רולים (רולים) בקוטר dp. במקרה זה, הכוח והמומנט של מנוע העגורן עקב כוחות חיכוך נמצאים בדומה למקרה של תנועה הדדית, כלומר:

כאן, בנוסף לערכים הידועים: G2 הוא משקל הפטיפון עם כל הציוד עליו, N; ωl - מהירות זוויתית, פלטפורמות, רד/שנייה; ב - יחס ההילוכים של תיבת ההילוכים של מנגנון התנופה וההילוך ההנעה של תיבת ההילוכים - פטיפון.

בעת קביעת הכוח של המנוף החשמלי, במקרים מסוימים יש צורך לקחת בחשבון את השינוי בעומס בעת עבודה במדרון. עומס הרוח על מנגנוני הסיבוב נקבע על ידי התחשבות בהבדל בכוחות הרוח הפועלים על המטען, בום העגורן ומשקל הנגד.
בעת תכנון כוננים חשמליים למנגנוני מנוף, בסוף בחירת המנוע, בודקים את ערכי התאוצה המותרים של הכונן החשמלי, שהנתונים לגביהם מופיעים בטבלה 1
טבלה 1 שם המנגנונים ומטרתם
שם המנגנונים ומטרתם האצה, m/s2 מנגנוני הרמה המיועדים להרמת מתכות נוזליות, חפצים שבירים, מוצרים, עבודות הרכבה שונות. תנועת עגורנים המיועדים לעבודות הרכבה מדויקות והובלת מתכות נוזליות, חפצים שבירים 0.1 - 0.2 מנגנוני תנועה עם כוח המשיכה של כוח המשיכה במלואו 0.2 - 0.7 עגלות מנוף אחיזה מלאה 0.8 - 1.4 סיבובי מנוף 0.5 - 1.2