מכשירים דיגיטליים: כפכפים, קומפרטורים ורגיסטרים
 מכשירים דיגיטליים בנויים על אלמנטים לוגיים, ולכן הם מצייתים לחוקי האלגברה הלוגית. המכשירים הבסיסיים של הטכנולוגיה הדיגיטלית, יחד עם מכשירי ההיגיון, הם כפכפים.
מכשירים דיגיטליים בנויים על אלמנטים לוגיים, ולכן הם מצייתים לחוקי האלגברה הלוגית. המכשירים הבסיסיים של הטכנולוגיה הדיגיטלית, יחד עם מכשירי ההיגיון, הם כפכפים.
טריגר (באנגלית trigger - trigger) - מכשיר אלקטרוני בעל שני מצבים יציבים והוא יכול לקפוץ ממצב אחד לאחר בהשפעת דחף חיצוני.
טריגרים או, ליתר דיוק, מערכות טריגר נקראות מחלקה גדולה של מכשירים אלקטרוניים שיש להם את היכולת להישאר באחד משני מצבים יציבים במשך זמן רב ולהחליף אותם בהשפעת אותות חיצוניים. כל מצב טריגר מזוהה בקלות על ידי ערך מתח המוצא.
כל מצב טריגר מתאים לרמת מתח פלט מסוימת (גבוהה או נמוכה):
1) הטריגר מוגדר למצב אחד - רמה «1».
2) הכפכף מאופס - רמה «0» ביציאה.
המצב היציב נשאר ככל הרצוי וניתן לשנותו על ידי דופק חיצוני או על ידי כיבוי מתח האספקה. צ'ה.כפכף הוא רכיב זיכרון אלמנטרי המסוגל לאחסן את יחידת המידע הקטנה ביותר (ביט אחד) «0» או «1».
כפכפים יכולים להיבנות על אלמנטים בדידים, אלמנטים לוגיים, על מעגל משולב או שהם חלק ממעגל משולב.
הסוגים העיקריים של כפכפים כוללים: כפכפי RS-, D-, T- ו-JK... בנוסף, כפכפים מחולקים לא-סינכרוני וסינכרוני. בהפעלה אסינכרונית, המעבר ממצב אחד לאחר מתבצע ישירות עם הגעת אות לכניסת המידע. בנוסף לכניסות נתונים, לכפכפים מסונכרנים יש כניסת שעון. המעבר שלהם מתרחש רק בנוכחות דופק שעון מאפשר.
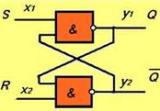
להדק RS יש לפחות שתי כניסות: S (סט - סט) - ההדק מוגדר למצב של רמה «1» ו-R (איפוס) - ההדק מאופס למצב של רמה "0". (איור 1).
בנוכחות קלט C, הכפכף הוא סינכרוני - החלפת הכפכף (שינוי מצב הפלט) יכול להתרחש רק ברגע הגעתו של הדופק המסנכרן (מסנכרן) בכניסה C.

איור 1 - ייצוג גרפי קונבנציונלי של כפכפי RS ומטרת המסקנות א) אסינכרוני, ב) סינכרוני
בנוסף לפלט הישיר, הכפכף יכול לקבל גם פלט הפוך, שהאות שלו יהיה הפוך.
טבלה 1 מציגה את המצבים שהכפכף יכול לקבל במהלך הפעולה. הטבלה מציגה את ערכי אותות הכניסה S ו-R ברגע מסוים של זמן tn ואת מצב הכפכף (של הפלט הישיר) ברגע הבא של הזמן tn + 1 לאחר הגעתו של הבא דופקים. מצב ההדק החדש מושפע גם מהמצב הקודם של Q n.
צ'ה.אם יש צורך לכתוב לטריגר «1» - אנו נותנים דופק לכניסת S, אם "0" - אנו שולחים דופק לכניסת R.
הצירוף S = 1, R = 1 הוא צירוף אסור כי אי אפשר לחזות איזה מצב יוקם במוצא.
טבלה 1 - טבלת מצבי כפכפי RS סינכרוניים

ניתן לראות את פעולת הכפכף גם באמצעות דיאגרמות תזמון (איור 2).
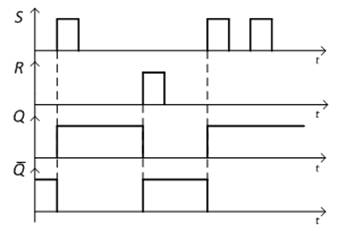
איור 2 - דיאגרמות תזמון של כפכף RS אסינכרוני
ל-D-trigger (מאנגלית delay - delay) יש קלט מידע אחד וכניסת שעון (מסנכרן) (איור 3).
הכפכף D מאחסן ומאחסן ביציאה Q את האות שהיה בכניסת הנתונים D בזמן הגעת פולס השעון C. הכפכף אוגר מידע שנכתב כאשר C = 1.
טבלה 2-טבלת המצבים של הכפכף D

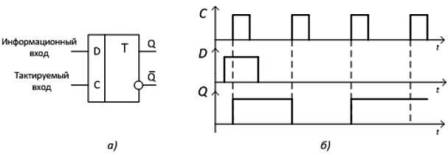
איור 3 - D-trigger: א) ייצוג גרפי רגיל, ב) דיאגרמות תזמון של פעולה
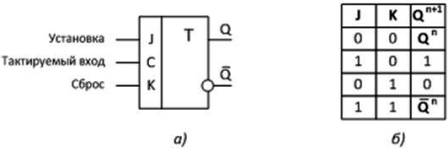
T-triggers (מהמטה האנגלית - התהפכות, סלטה), הנקראים גם ספירת כפכפים, הם בעלי קלט מידע אחד T. כל פולס (דעיכת דופק) של כניסת T (קלט ספירה) מעביר את ההדק למצב הפוך.
איור 4 מציג את סמל ה-T-trigger (א) ודיאגרמות התזמון של הפעולה (ב).
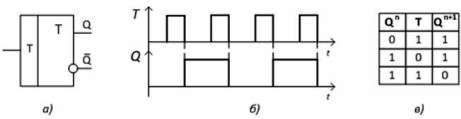
איור 4-T-flip flop א) סימון גרפי קונבנציונלי, ב) דיאגרמות תזמון של פעולה ג) טבלת מצבים
לטריגר JK (מהקפיצה האנגלית - jump, keer - hold) יש שתי כניסות נתונים J ו-K וכניסת שעון C. ההקצאה של פינים J ו-K דומה להקצאה של פינים R ו-S, אך להדק יש ללא שילובים אסורים. אם J = K = 1, הוא משנה את מצבו להיפך (איור 5).
עם חיבור מתאים של הכניסות, הדק יכול לבצע את הפונקציות של RS-, D-, T-triggers, כלומר. הוא טריגר אוניברסלי.
איור 5 -JK -כפכף א) סימון גרפי קונבנציונלי, ב) טבלת מצבים מקוצרת
Comparator (השוואה - השווה) - התקן שמשווה שני מתחים - כניסה Uin עם הפניה Uref. מתח הייחוס הוא מתח קבוע עם קוטביות חיובית או שלילית, מתח הכניסה משתנה עם הזמן. מעגל ההשוואה הפשוט ביותר המבוסס על מגבר תפעולי מוצג באיור 6, א. אם Uin Uop במוצא U - us (איור 6, ב).
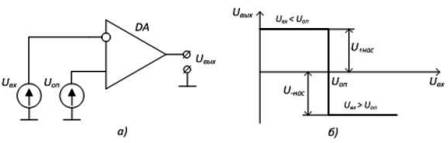
איור 6 - משווה Op-amp: א) הסכמה הפשוטה ביותר ב) מאפייני ביצועים
משווה משוב חיובי נקרא שמיט טריגר. אם המשווה עובר מ- «1» ל- «0» ולהיפך באותו מתח, אז ההדק של שמיט - במתחים שונים. מתח הייחוס יוצר מעגל PIC R1R2, אות הכניסה מוזן לכניסה ההפוכה של מגבר ההפעלה. איור 7, ב, מציג את מאפיין ההעברה של הדק Schmitt.
במתח שלילי בכניסת המלאי של מערכת ההפעלה Uout = U + sat. המשמעות היא שמתח חיובי פועל על הקלט הלא-היפוך. ככל שמתח הכניסה גדל, הנוכחי Uin > Uneinv. (Uav — טריגר) המשווה עובר למצב Uout = U -sat. מתח שלילי מופעל על הקלט שאינו מתהפך. בהתאם, עם ירידה במתח הכניסה ברגע Uin <Uneinv. (Uav — טריגר) המשווה נכנס למצב Uout = U + sat.
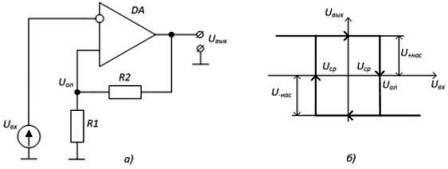
איור 7 - פעולת שמיט של מגבר הפעלה: א) הסכימה הפשוטה ביותר ב) מאפייני ביצועים
דוגמה. איור 8 מציג סכימה של מגע-ממסר לשליטה במנוע חשמלי, המאפשר לו להתחיל, לעצור ולהפוך לאחור.
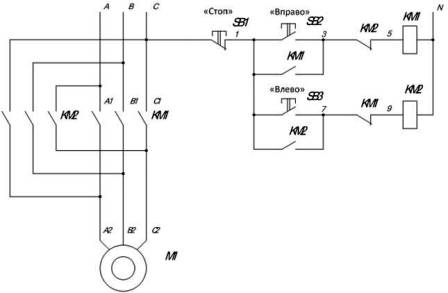
איור 8 - ערכת בקרת מנוע ממסר-מגע
העברת המנוע החשמלי מתבצעת על ידי סטרטרים מגנטיים KM1, KM2. מגעים סגורים באופן חופשי KM1, KM2 מונעים פעולה בו זמנית של סטרטרים מגנטיים. מגעים פתוחים בחופשיות KM1, KM2 מספקים נעילה עצמית של הלחצנים SB2 ו-SB3.
כדי לשפר את אמינות הפעולה, יש צורך להחליף את מעגלי הבקרה ומעגלי הכוח של ממסר-מגע עם מערכת ללא מגע באמצעות התקנים והתקנים מוליכים למחצה.
איור 9 מציג מעגל בקרת מנוע ללא מגע.
מגעי הכוח של המתנעים המגנטיים הוחלפו באופטו-סימיסטורים: KM1-VS1-VS3, KM2-VS4-VS6. השימוש באופטוזימיסטורים מאפשר לבודד מעגל בקרה עם זרם נמוך ממעגל אספקה רב עוצמה.
טריגרים מספקים לחצני נעילה עצמית SB2, SB3. אלמנטים לוגיים ומבטיחים הפעלה בו-זמנית של רק אחד מהסטרטרים המגנטיים.
כאשר הטרנזיסטור VT1 נפתח, הזרם זורם דרך נוריות ה-LED של הקבוצה הראשונה של אופטו-סימיסטורים VS1-VS3, ובכך מבטיח את זרימת הזרם דרך פיתולי המנוע. פתיחת הטרנזיסטור VT2 מספקת את הקבוצה השנייה של אופטו-סימיסטורים VS4 -VS6, הבטחת סיבוב המנוע החשמלי לכיוון השני.
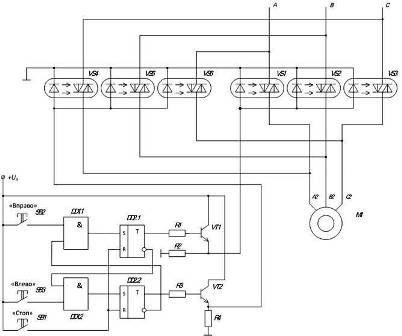
איור 9 - מעגל בקרת מנוע ללא מגע
Register - מכשיר אלקטרוני המיועד לאחסון והמרה לטווח קצר של מספרים בינאריים רב ספרתיים. הרגיסטר מורכב מכפכפים, שמספרם קובע כמה סיביות מספר בינארי יכול הרגיסטר לאחסן - גודל האוגר (איור 10, א). ניתן להשתמש באלמנטים לוגיים כדי לארגן את פעולת הטריגרים.
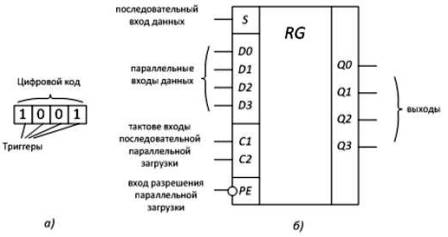
איור 10 - רישום: א) ייצוג כללי, ב) סימון גרפי קונבנציונלי
על פי שיטת הקלט והפלט של המידע, רגיסטרים מחולקים למקבילים וטוריים.
באוגר רציף, הכפכפים מחוברים בסדרה, כלומר, היציאות של הכפכף הקודם מעבירות מידע לכניסות של הכפכף הבא. כניסות שעון כפכף C מחוברות במקביל. לאגר כזה יש קלט נתונים אחד וכניסת בקרה - כניסת שעון C.
אוגר מקביל כותב בו זמנית לכפכפים שעבורם יש ארבע כניסות נתונים.
איור 10 מציג את ה-UGO ואת הקצאת הפינים של אוגר מקבילי-טורי של ארבע סיביות.