מצבי בלימת מנוע עירור רציף
 מנועים חשמליים נרגשים מסדרה בכוננים חשמליים פועלים הן במצב נהיגה והן במצב בלימה. בניגוד למנוע עירור מקביל, מצב גנרטור עם החזרת אנרגיה לרשת עבור מנועי עירור סדרתיים אינו ישים, שכן המעבר למצב זה, כפי שניתן לראות מהמאפיינים המכניים (איור 1), ידרוש מהירות סיבוב גבוהה באופן בלתי מקובל. העיקרי שבהם, הקל ביותר ליישום, הוא מצב בלימה הפוך.
מנועים חשמליים נרגשים מסדרה בכוננים חשמליים פועלים הן במצב נהיגה והן במצב בלימה. בניגוד למנוע עירור מקביל, מצב גנרטור עם החזרת אנרגיה לרשת עבור מנועי עירור סדרתיים אינו ישים, שכן המעבר למצב זה, כפי שניתן לראות מהמאפיינים המכניים (איור 1), ידרוש מהירות סיבוב גבוהה באופן בלתי מקובל. העיקרי שבהם, הקל ביותר ליישום, הוא מצב בלימה הפוך.
בכוננים של מכונות עם פוטנציאל לרגעים סטטיים (לדוגמה, הרמת כננות), ההעברה ממצב המנוע לכיוון ההפוך מתבצעת על ידי הכנסת התנגדות נוספת במעגל האבזור (נקודה A). מומנט המנוע יורד, ותחת פעולת המומנט הסטטי שנוצר מהעומס, המנוע יתחיל להסתובב בכיוון ההפוך לפעולת המומנט שלו. העומס יורד (נקודה C).
עבור בלימת מכונות חשמליות עם מומנט סטטי תגובתי (ללא עתודת אנרגיה פוטנציאלית), נעשה שימוש במיתוג מתפתל היפוך (הפוך). כל מה שנאמר לעיל בקשר לייצוג המאפיינים במצב זה ואחרים של המנוע הנרגש באופן עצמאי חל באופן שווה על המנוע המעורב בסדרה.
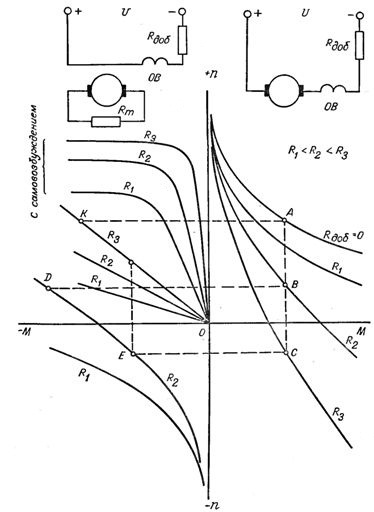
אורז. 1. דיאגרמות חיבור ומאפיינים מכניים של מנוע DC עם עירור סדרתי
מצב בלימה אלקטרודינמית מנוע עירור סדרתי מיושם בשתי דרכים: עירור עצמי ועירור עצמי. עם עירור עצמאי, מתפתל השדה מחובר לרשת דרך הנגד המגביל, והאבזור המנותק מהרשת מחובר לנגד הבלימה. במקרה זה, השטף המגנטי יהיה קבוע, ומצב הפעולה והמאפיינים המכניים של המנוע יתאימו לבלימה אלקטרודינמית דומה של מנוע עירור מקביל.
לפעמים בבלימה דינמית משתמשים בגירוי עצמי, כלומר, האבזור, המנותק מהרשת, נסגר להתנגדות הבלימה, מה שמאלץ את המנוע לפעול במצב של גנרטור מעורר עצמי. במקרה זה, יש צורך להחליף את קצות האבזור או פיתולי העירור, ואז זרם מצב הגנרטור יגדיל את השטף של מגנטיות שיורית, אחרת עירור עצמי לא יתרחש.
גם בסיבובים נמוכים המנוע לא מרגש. החל מערך מהירות מסוים, תהליך העירור העצמי ממשיך מהר מאוד, מה שגורם לעלייה חדה במומנט הבלימה; כתוצאה מכך, החלק המכני של הכונן נתון להלם.
תופעות כאלה בדרך כלל אינן רצויות, וזו הסיבה שמשתמשים בגירוי עצמי במקרה של עצירת חירום. מצב עירור עצמי אינו דורש הפעלת הסלילים מהרשת.