ויסות המהירות הזוויתית של מנוע האינדוקציה על ידי שינוי מספר זוגות הקטבים של הסטטור
 ככל שמספר זוגות הקטבים גדל, מהירות הזווית של השדה יורדת, ומכאן שגם מהירות הרוטור של מנוע האינדוקציה יורדת. מהדורה מיוחדת מנועים אסינכרוניים בעלי שני מהירויות, אשר פיתולי הסטטור מורכבים מחלקים נפרדים. ניתן לחבר אותם שוב בשתי דרכים שונות: כוכב וכוכב כפול (איור 1, א, ב) או משולש וכוכב כפול (איור 1, ב, ד).
ככל שמספר זוגות הקטבים גדל, מהירות הזווית של השדה יורדת, ומכאן שגם מהירות הרוטור של מנוע האינדוקציה יורדת. מהדורה מיוחדת מנועים אסינכרוניים בעלי שני מהירויות, אשר פיתולי הסטטור מורכבים מחלקים נפרדים. ניתן לחבר אותם שוב בשתי דרכים שונות: כוכב וכוכב כפול (איור 1, א, ב) או משולש וכוכב כפול (איור 1, ב, ד).
בכוכב כפול, מהירות השדה תמיד כפולה מזו של כוכב או משולש. עם זאת, מתגים אלה אינם שווים. העובדה היא שהמומנט המרבי המותר במהלך פעולה רציפה נקבע על ידי זרם הפאזה המרבי המותר בהתאם לתנאי החימום של הפיתולים ותלוי בשטף הסטטור פרופורציונלי לריבוע מתח הפאזה. גם ההספק המותר לטווח ארוך תלוי באותם ערכים.
אם מעבירים את פיתולי המנוע מכוכב לכוכב כפול, מתח הפאזה לא ישתנה, וכאשר עוברים מדלתא לכוכב כפול, הוא יורד פי √3. אבל עם כוכב כפול, הזרם בכל שלב יכול להיות פי שניים מאשר בכוכב או בדלתא, מכיוון שכל שלב מורכב משני ענפים מקבילים. לאחר מכן אנו מוצאים שכאשר עוברים מכוכב לכוכב כפול, המהירות וההספק מכפילים, לכן המומנט הקריטי נשאר קבוע (M = P /ω= const).
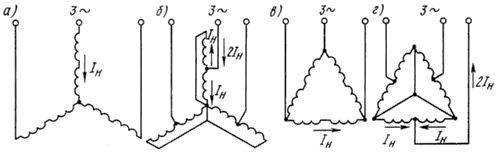
אורז. 1. סכמות לחיבור פיתולי הסטטור של מנוע אסינכרוני בכוכב (א) וכוכב כפול (ב), בדלתא (c) ובכוכב כפול (ד)
אם אתה עובר מדלתא לכוכב כפול, מתח הפאזה יורד פי √3. ואז, אפילו עם זרם דו-פאזי, ההספק יגדל רק ב-2 /√3 = l, פי 18 ויכול להיחשב ללא שינוי. במקרה זה, כאשר המהירות הזוויתית גדלה בפקטור של שניים, ההספק כמעט משתנה, והמומנט יורד בערך בפקטור של שניים. לפיכך, מומלץ להשתמש במנועים להנעת מכשירי הרמה שהפיתולים שלהם מחוברים בכוכב, ולהנעת מכונות חיתוך מתכת, מנועים שפיתולי הסטטור שלהם מחוברים בדלתא.

אורז. 2. נתוני דרכון של מנוע רב מהירויות
ישנם מנועים חשמליים אסינכרוניים עם שני פיתולי סטטור מבודדים זה מזה, אחד מהם ללא מיתוג, והשני עם עמודי מיתוג. לאחר מכן מתקבלים מנועים בעלי שלושה הילוכים. אם שני הפיתולים משתנים בקוטב, אז המנועים הם ארבעה שלבים. במקרים מסוימים משתמשים בשני פיתולים מבודדים עם מספר שונה של זוגות מוטות. pp בלי להחליף.לדוגמה, במנועי מעליות p1 = 3 ו- p2 = 12, המתאים למהירות הסיבוב הסינכרונית של 1000 ו-250 סל"ד.
באיור. איור 3a מציג את המאפיינים המכניים של מנוע כוכב לכוכב כפול בעל שני מהירויות, ואיור. 3, b - כאשר עוברים ממשולש לכוכב כפול.
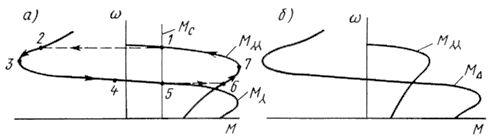
אורז. 3... מאפיינים מכניים של מנועים חשמליים אסינכרוניים בעת מעבר מכוכב לכוכב כפול (א) ומדלתא לכוכב כפול (ב)
במקרה של שינוי מהיר ממהירות גבוהה יותר למהירות נמוכה יותר, המנוע פועל לזמן מה. מצב השעיה... למעשה, אם מהירות השדה יורדת, אז ברגע הראשון הרוטור ממשיך להסתובב באותה מהירות.
המנוע עובר באופן מיידי ממאפיין אחד לאחר, כלומר. מנקודה 1 לנקודה 2 (איור 3, א). בלימה רגנרטיבית לאחר מכן (נקודות 2, 3, 4), בנקודה 5 היא מתחילה לפעול במצב יציב. אם אתה עובר ממהירות נמוכה יותר לגבוהה יותר, המנוע זז מיידית מנקודה 5 לנקודה b, ואז תאוצה מגיעה (נקודות 6 ו-7) ובנקודה 1 מופיע שוב מצב שיווי משקל.