בחירת מנוע חשמלי אסינכרוני לפעולה במצב בלימה דינמית על ידי עירור עצמי
 מנוע חשמלי אסינכרוני עם רוטור מפותל עם ערכת הבקרה הפשוטה ביותר - הכללת ההתנגדות במעגל הרוטור היא בעלת תכונות בקרה נמוכות ביותר. לכן, לפני הזמינות של ממירי תדרים בשוק, פותחו תוכניות שונות כדי להשיג מהירות מופחתת במצב ירידה.
מנוע חשמלי אסינכרוני עם רוטור מפותל עם ערכת הבקרה הפשוטה ביותר - הכללת ההתנגדות במעגל הרוטור היא בעלת תכונות בקרה נמוכות ביותר. לכן, לפני הזמינות של ממירי תדרים בשוק, פותחו תוכניות שונות כדי להשיג מהירות מופחתת במצב ירידה.
למעשה, אין כל כך הרבה מהם. בחו"ל הפך השימוש במכונה חשמלית נוספת - בלם מערבולת המותקן על אותו פיר של המנוע הראשי - נפוץ. התוכנית מאפשרת לך לקבל מאפיינים מכניים קשיחים מספיק בעת הורדת העומס, אך לכונן חשמלי כזה יש מאפייני אנרגיה נמוכים במיוחד (אנרגיית בלימה משתחררת בבלם המערבולת). בנוסף, לבלם המערבולת יש עלות גבוהה למדי ומסבך מאוד את הפריסה של החלק המכני.
לכן, על מנת לקבל את מהירות הנחיתה במנגנוני הרמה המבוססים על מנוע אסינכרוני עם רוטור פאזה במפעל דינמו בסוף שנות ה-70, צוות תכנון בראשות E.M. פבזנר הציג בלימה דינמית נרגשת מעצמה.
כונן חשמלי כזה נמצא בשימוש נרחב בעגורנים ביתיים (פאנלים מסוג TSD, TSDI, KSDB עבור מנופי גשרים, גבלים וגנריים, לוחות בקרה עבור מנופי מגדל KB-309, KB-403, KB-404, KB-405, KB - 406, KB-408, KB-415, KB-415-07, KB-473, KBM-401P.). לפיכך, אנו מדברים על עשרות אלפי מנופים בפעילות.
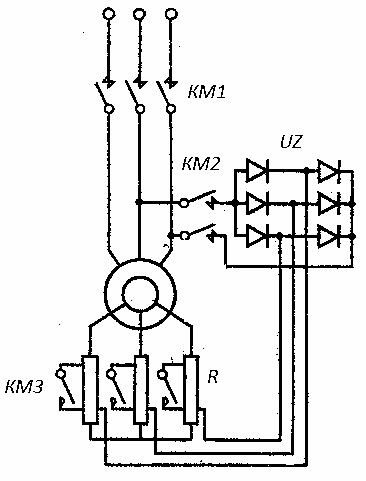
אורז. 1. תוכנית הכללת מנוע אסינכרוני במצב בלימה דינמית על ידי עירור עצמי
העיקרון של בלימה דינמית עם עירור עצמי הוא כדלקמן:
מעגל הרוטור כולל מיישר תלת פאזי UZ (איור 1). המנוע החשמלי מנותק מהרשת באמצעות מגע KM1. המתח המיושר מחובר לסטטור המתפתל דרך המגע KM2. מגעי המגע KM3 סגורים. כאשר הבלם משוחרר (לא מוצג בתרשים), ציר המנוע מתחיל להסתובב תחת פעולת המשקל הנופל.
EMF מושרה בפיתול הרוטור, שבהשפעתו מתחיל לזרום זרם במעגל הרוטור-סטטור. המנוע מפתח את מומנט הבלימה, העומס מוריד במהירות קבועה. ערך המהירות נקבע לפי ערך ההתנגדות של מעגל הרוטור. ככל שההתנגדות גדולה יותר, כך קצב הירידה מהיר יותר. כדי להגביר את המהירות, מגע KM3 כבוי.
במצב בלימה דינמית של עירור עצמי, הכונן החשמלי צורך כוח מהרשת רק כדי להפעיל את הדוחף ההידראולי של הבלמים וציוד מגע ממסר. כדוגמה, איור. 7 מציג את המאפיינים המכניים של כונן חשמלי עם לוח TSD.
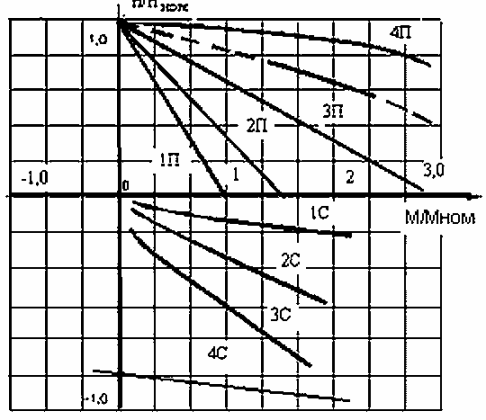
אורז. 2. מאפיינים מכניים של ההנעה החשמלית של מנגנון ההרמה עם לוח TSD
מאפייני בלימה דינמיים מוגדרים כ- 1C, 2C, 3C. ניתן לראות שלמאפיינים יש קשיות מספקת. התאמת המהירות מתבצעת בטווח 1: 8, אשר ברוב המקרים מספיק עבור ברזי המונים.
התנאי לעירור עצמי של המנוע החשמלי הוא:
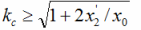
כאשר x '2- התנגדות אינדוקטיבית של פיתול הרוטור, אוהם; התנגדות אינדוקטיבית хо- של מעגל הממגנט. אום
כאשר ks - מקדם של התוכנית
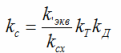
kd - מקדם הפחתת זרם הרוטור לזרם הסטטור; kcx - מקדם מעגל תיקון, עבור מעגל גשר תלת פאזי kx = 0.85; kt הוא מקדם הטרנספורמציה של המנוע מסטטור לרוטור
מקדם kd תלוי בסכימת החיבור של פיתולי הסטטור, המחוברים לכוכב במנועי ברזים ביתיים במתח רשת של 380 וולט.
מקדם kt תלוי במקדם הטרנספורמציה, כלומר. של היחס בין מתח הסטטור למתח הרוטור, התלוי בסוג המנוע. לדוגמה, עבור מספר מנועים חשמליים מסדרות MT ו-4MT, הערך והפרמטרים הקשורים מוצגים בטבלה. 1.
שולחן 1.
כוח סוג מנוע חשמלי, קילוואט מתח רוטור, V kt x x '2 xho √(1 + 2x '2/ho) MTN412-6 30 255 1.5 1.3 0.173 3.74 1.04 4MTN225L6 55 290 1.13 1.31 1.31 1.31 1.31 -6 55 340 1.11 0.98 0.197 3.8 1.05 4MTN280L10 75 308 1.23 1.06 0.146 2.33 1.06 4MTN280M6 110 420 0. 9 0.7 0.083 2.98 2.98
מצב кс ≥ √(1 + 2х '2/хо) מתבצע עבור מנועים מסוג MTN412-6, 4MTN225L6, אשר ניתן לכנותם "מתרגשים". מנועים חשמליים כאלה נכנסים למצב עירור עצמי מבלי לקבל החלטות מעגל נוספות. עם זאת, בהתקנים מלאים במתח נמוך (מתג מתח נמוך או לוחות בקרה) המיועדים לעבוד יחד עם מנועים כאלה, מסופק עירור ראשוני קטן לפעולה אמינה.
העירור הראשוני מתבצע על ידי העברת קבוע, מה שנקרא ערך קטן של "זרם אספקה" (בדרך כלל לא יותר מ-10% מהזרם הנקוב של המנוע) ממיישר חצי גל. עבור מנועים נרגשים, בכל מקרה, זה מספיק למעבר אמין למצב הבלימה הדינמית הנרגשת מעצמה.
מנועים חשמליים MTN512-6, 4MTN280M6, שעבורם התנאי кс ≥ √(1 + 2х '2/хо) אינו מרוצה, "לא מתרגשים". זה לא אומר שמנועים כאלה לא יכולים לפעול במצב בלימה דינמית עם עירור עצמי, אבל הערך של הזרם הנוסף הנדרש עבורם מגיע ל-50% מהזרם הנקוב של הסטטור.זה מחייב שימוש ב-NKU מיוחד (לוחות בקרה) עבור מנועים חשמליים שאינם מתרגשים. …
מנוע חשמלי מסוג 4MTN280L10 עם кс = √(1 + 2х '2/хо) נמצא בגבול של עירור עצמי וכל שינוי אקראי בפרמטרים יכול להפר את תנאי העירור העצמי. לכן, מנוע כזה יכול להיות מסווג גם כבלתי מעורר.
הפרמטרים העיקריים המשפיעים על יכולתו של המנוע החשמלי לעורר את עצמו הוא המתח הנקוב של הרוטור E2nom. יש לקחת את הערך הקריטי של E2nom, שבו עירור עצמי אינו מתרחש ללא זרם אספקה גדול, כ-300 V.
מאפיין זה של מצב בלימה דינמי של עירור עצמי נלקח בחשבון על ידי מפעל Dynamo ו-Sibelektromotor PO בעת פיתוח סדרה של מנועים חשמליים מנוף 4MT בתחילת שנות ה-80.
במיוחד, ערך ה-E2nom עבור חלק מהמנועים החשמליים הופחת בהשוואה לסדרת ה-MT הקודמת כדי להפוך את המנועים למרגשים.
לדוגמה, עבור המנוע החשמלי 4MTN225L6, בשימוש נרחב בהנעה חשמלית של עגורני מגדלים, E2nom הופחת בהשוואה למנוע הקודם מסדרת MTN512-6 מ-340 ל-290 וולט, מה שגרם למנוע מלהיב את עצמו. מאוחר יותר, OJSC "Sibelelectromotor" החל בייצור של מנוע חשמלי 4MTM225L6 עם אותם פרמטרים.
עם הזמן, מנועים חשמליים עם מטרה דומה החלו להיות מיוצרים על ידי יצרנים אחרים.
מפעל הבנייה של עגורני Rzhevsky מייצר את המנוע החשמלי MKAF225L6, חברת Siberian Electrotechnical מייצרת את המנוע החשמלי 4MTM225L6 PND.למרות המראה השונה מהאב-טיפוס הקשור ליכולות הטכנולוגיות של כל אחד מהיצרנים, לכל המנועים החשמליים הללו אותם פרמטרים חשמליים וממדי התקנה והם ניתנים להחלפה מוחלטת.
השוני בשמות המנועים מאפשר למשתמש לבצע בחירה מושכלת של יצרן כזה או אחר, מונחית על פי העדפותיו שלו, מחיר, זמן אספקה וכו'. ויחד עם זאת, היו בטוחים לחלוטין שהחלפת מנוע חשמלי של יצרן ברז אחד למנוע חשמלי של יצרן אחר לא תוביל לתקלה בברז או לתאונה.
עם זאת, בעשור האחרון הופיעו בשוק המקומי מנועים חשמליים מיצרנים שונים, שהמותג שלהם משחזר בדיוק את המותג של המנוע החשמלי "המקורי" המיוצר על ידי JSC "Sibelelectromotor". ניתן להניח שמקורם של מנועים חשמליים קשור לשכנה המזרחית הגדולה של ארצנו. המחיר שלהם נמוך מעט מזה של היצרנים המסורתיים, כך שהעניין בהם מהאספקה של ארגונים מובן.
כך, בהזמנת מנוע חשמלי להתקנה על מנוף מיוצר או החלפת מנוע חשמלי פגום במנוף במנוע תקין, ניתן לקבל מנוע חשמלי של יצרן לא מוכר, בעל E2nom שונה מהאב-טיפוס של המנוע החשמלי.
המצב מזכיר קצת את תחילת שנות ה-90, כשכמה להקות פופ עם אותו שם טיילו בארץ במקביל.
הבה נזכיר שוב שהיחס E2nom / I2nom הוא הפרמטר החשוב ביותר של מנוע עם רוטור פצוע, המשפיע על בחירת נגדי התנעה, ציוד ממסר-מגע וכאמור לעיל, על מצב של עירור עצמי של מנוע חשמלי.
עם זאת, לעתים קרובות אין נתוני רוטור כלל על לוחיות השמות של מנועים משובטים. הנה דוגמא:
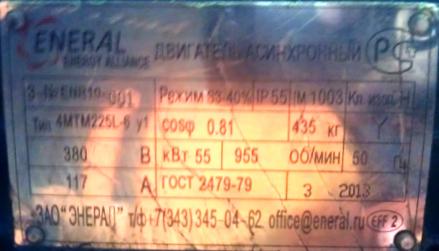
אורז. 3. לוחית שם מנוע אסינכרוני של מנוף רוטור
אגב, למנוע החשמלי הזה היה הערך "הנכון" E2nom, רק עכשיו היה צריך לקבוע אותו באופן אמפירי.
בקטלוגים של יצרנים אחרים עבור המנוע החשמלי 4MTM225L6, מצוין הערך E2nom = 340 V, כלומר. המנוע הנרגש הפך למנוע לא נרגש. התוצאה של שימוש במנוע חשמלי כזה כחלק מהנעה חשמלית עם בלימה דינמית עם עירור עצמי היא ירידה בעומס והפרדה של המנוע החשמלי עם הרס מכני של פיתולי הרוטור והסטטור.
בדיוק התמונה הזו הבחין המחבר לאחרונה באחד ממפעלי בניית המכונות הרוסיים הוותיקים ביותר, שם נמסר מנוף גשר חדש עם מנוע חשמלי משוכפל מסוג 4MTM225L6 עם E2n = 340 V. רק במזל, אנשים לא עשו זאת. סובל. בנוסף, בעל המנוף משחזר את המנוע שלוש (!) פעמים לאחר התחמקות.
יצרנית אחרת של מנועים חשמליים משובטים, שכנראה חוותה שוב ושוב תאונות דומות, מייצרת כעת שני מנועים חשמליים תחת אותו מותג (!). אחד עם E2nom = 340 V, השני עם E2nom = 264 V ניתן בקטלוג עם הערה: "עבור סוג KB ברזים", כלומר. מנופי מגדלים.
מנוע כזה אכן נמצא בשימוש הנפוץ ביותר במנופי מגדלים, אך הוא מותקן גם במנופי גשר. כך תוכלו לשמוע את הדיאלוג בין הספק ללקוח: "בשביל איזה מנוף צריך מנוע? עבור הריצוף. ואז קח את זה (E2nom = 340 V). » ובהנעה של המנפים החשמליים יש לוח בקרה עם בלימה דינמית מתרגשת מעצמה. התוצאה מתוארת לעיל.
יחד עם זאת, אף אחד לא אומר שהמנועים החשמליים הללו פגומים או לא אמינים ולא ניתן להשתמש בהם על מנופים. ככל שיש יותר אפשרויות בשוק, כך ייטב. כמו שאומרים, יש עוד מנועים טובים ושונים. רק שהמותג שלהם מטעה את הצרכן, מה שעלול להיות כרוך בתוצאות מסוכנות.
כדי להשתמש במנוע חשמלי עם פרמטרים של רוטור מלבד אב הטיפוס, עליך:
-
מדוד E2nom כאשר מעגל הרוטור פתוח וסליל הסטטור מחובר לרשת;
-
בהתבסס על מדידות E2nom, חשב, בחר והזמין נגדי נטל;
-
בחרו לוח בקרה למנועים חשמליים ללא עירור מהקטלוג והזמינו אותו.
או שאתה יכול פשוט לשאול על הערך של E2nom לפני הזמנת מנוע שמושך עם המחיר שלו ולהסכים ספציפית על כך בחוזה. עם זאת, זה לא מונע את המדידה של E2nom במהלך בקרת הקלט של המנוע שהוזמן.
לסיכום האמור לעיל, נוכל להסיק את המסקנות הבאות:
-
בהנעה החשמלית של ברזים ביתיים המבוססים על מנועים חשמליים של רוטור פאזה, נעשה שימוש נרחב בבלימה דינמית מתרגשת. עשרות אלפי כוננים חשמליים כאלה פועלים. הם עדיין מונפקים.
-
כדי לפעול במצב בלימה דינמית מתרגשת, המנוע החשמלי חייב להיות בעל יחס מסוים של E2nom / I2nom.
-
התנאי העיקרי לעירור עצמי של מנוע חשמלי עם רוטור פצע הוא הערך של E2nom ≤ 300 V.
-
השימוש במנועים חשמליים עם E2nom> 300 V עם לוחות בקרה המיועדים למנועים חשמליים נרגשים עלול לגרום לירידת העומס ולהרוס את המנוע החשמלי.