מבחר מנועים חשמליים לציוד עם סוגים שונים של עומס ומצבי פעולה
 הבחירה הנכונה של מנועים חשמליים למנגנוני ייצור מבטיחה את פעולתם רציפה ואמינה לאורך חיי השירות הסטנדרטיים. זהו תהליך חשוב מאוד שבו יש לקחת בחשבון גורמים וקריטריונים רבים ושונים. אחד הגורמים החשובים ביותר הוא התחשבות באופי וסוג העומס.
הבחירה הנכונה של מנועים חשמליים למנגנוני ייצור מבטיחה את פעולתם רציפה ואמינה לאורך חיי השירות הסטנדרטיים. זהו תהליך חשוב מאוד שבו יש לקחת בחשבון גורמים וקריטריונים רבים ושונים. אחד הגורמים החשובים ביותר הוא התחשבות באופי וסוג העומס.
להלן כל הקריטריונים שיש לקחת בחשבון בעת הבחירה: כיצד לבחור את המנוע החשמלי הנכון
בבחירת מנועים חשמליים למכונות, מתקנים ומכונות שונות, יש צורך לקחת בחשבון את סוגי העומס השונים, סוג המאפיינים המכניים, אופי ומשך מחזורי העבודה של מנגנונים אלו.
לדעת כיצד ישתנה העומס על הפיר של המנוע החשמלי הנבחר, ניתן לקבוע במדויק כיצד ישתנו הפסדי הכוח במהלך הפעולה, ובזכות זאת, בחר מנוע חשמלי שעובד בעומס נתון לא יתחמם יתר על המידה . טמפרטורת החימום המקסימלית של בידוד המנוע החשמלי לא תעלה על הערך המותר במהלך כל מחזור העבודה.
בחירה לא נכונה של מנועים חשמליים של מנגנוני ייצור מובילה לשיבוש תהליכי הייצור ומובילה לאובדן מוצרים מיוצרים ולעלויות חשמל נוספות.
ציוד חשמלי עם מנועים חשמליים חייב לעמוד במלוא הדרישות של התהליך הטכנולוגי.
הבחירה באחד מסוגי הקטלוג של מנועים חשמליים נחשבת לנכונה אם מתקיימים התנאים הבאים:
-
ההתכתבות המלאה ביותר של המנוע החשמלי עם המכונה הפועלת (מנגנון הנעה) מבחינת תכונות מכניות. משמעות הדבר היא שהמנוע החשמלי חייב להיות בעל מאפיין מכני כזה שהוא יכול לספק לכונן את הערכים הדרושים של מהירות ותאוצה במצב נייח וחולף;
-
שימוש מרבי בכוח המנוע החשמלי בכל מצבי הפעולה. הטמפרטורה של כל החלקים הפעילים של המנוע החשמלי במצבי ההפעלה החמורים ביותר צריכה להיות קרובה ככל האפשר לטמפרטורת החימום המותרת, אך לא לחרוג ממנה;
-
תאימות של המנוע החשמלי עם הכונן ותנאי הסביבה מבחינת עיצוב;
-
התאמה של המנוע החשמלי לפרמטרים של ספק הכוח.
כדי לבחור מנוע חשמלי, נדרשים הנתונים הבאים:
-
סוג ושם מנגנון ההנעה;
-
כוח פיר מקסימלי, אם מצב הפעולה רציף והעומס קבוע, ובמקרים אחרים, גרפים של שינויים בהספק או במומנט ההתנגדות של הציר כפונקציה של זמן;
-
תדר סיבוב (או טווח תדר סיבוב) של פיר ההינע;
-
שיטת ביטוי של מנגנון ההנעה עם פיר המנוע החשמלי (בנוכחות תמסורות קינמטיות, מסומנים סוג ההילוכים ויחס ההילוכים);
-
כמות מומנט ההתחלה שעל המנוע החשמלי לספק לציר ההינע;
-
מגבלות ויסות מהירות (ערכים עליונים ונמוכים וערכי הספק ומומנט מתאימים);
-
איכות נדרשת (חלקות, הדרגתיות) של בקרת מהירות;
-
תדירות הפעלת הכונן בתוך שעה;
-
מאפייני הסביבה החיצונית.
בחירת מנוע חשמלי בהתבסס על כל התנאים והנתונים הנומינליים מתבצעת על פי קטלוגים.

אופני הפעולה האפשריים של כוננים חשמליים נבדלים במגוון עצום מבחינת אופי ומשך המחזורים, ערכי העומס, תנאי הקירור, היחס בין הפסדי התנעה והפעלה חלקה וכו', ולכן ייצור מנועים חשמליים לכל אחד מהם מצבי הפעולה האפשריים של כונן חשמלי אינם הגיוניים מעשית.
בהתבסס על ניתוח מצבים אמיתיים, מזוהה מחלקה מיוחדת של מצבים - מצבים נומינליים, שעבורם מתוכננים ומיוצרים מנועים טוריים.
הנתונים הכלולים בדרכון של מכונה חשמלית מתייחסים למצב נומינלי מסוים ונקראים הנתונים הנומינליים של מכונה חשמלית.
היצרנים מבטיחים שכאשר המנוע החשמלי פועל במצב מדורג בעומס מדורג, הוא מנוצל באופן תרמי במלואו.
ה-GOST הנוכחי מספק 8 מצבים נומינליים, שבהתאם לסיווג הבינלאומי יש סמלים S1 - S8.
חובה מתמשכת S1 - פעולת המכונה בעומס קבוע למשך זמן מספיק ארוך כדי להשיג טמפרטורה קבועה של כל חלקיה.
עבודה לטווח קצר S2 - פעולת המכונה בעומס קבוע למשך זמן שאינו מספיק כדי שכל חלקי המכונה יגיעו לטמפרטורה שנקבעה, ולאחר מכן עצירת המכונה למשך זמן מספיק כדי לקרר את המכונה לטמפרטורה של לא יותר מ-2 מעלות צלזיוס מטמפרטורת הסביבה. עבור עבודה קצרת מועד, משך תקופת העבודה הוא 15, 30, 60, 90 דקות.
עבודה לסירוגין S3 - רצף של מחזורי עבודה זהים, שכל אחד מהם כולל את זמן פעולת העומס המתמשך שבמהלכו המכונה לא מתחממת לטמפרטורה שנקבעה ואת זמן החניה שבמהלכו המכונה לא מתקררת לטמפרטורת הסביבה.
במצב זה, מחזור העבודה הוא כזה שזרם הכניסה אינו משפיע באופן משמעותי על עליית הטמפרטורה. זמן המחזור אינו מספיק כדי להשיג שיווי משקל תרמי ואינו עולה על 10 דקות. המצב מאופיין בערך של משך ההכללה באחוזים:
מנועים המיוצרים על ידי התעשייה עבור אופן פעולה זה מאופיינים במחזור עבודה (PV), המוגדר על ידי משך מחזור עבודה אחד
כאשר tp הוא זמן פעולת המנוע; tp - זמן השהייה.
ערכים מתוקננים של משך ההכללה: 15, 25, 40, 60% או ערכים יחסיים של משך תקופת העבודה: 0.15; 0.25; 0.40; 0.60. עבור מצב S3, הנתונים המדורגים תואמים רק למחזור עבודה מסוים ומתייחסים לתקופת השירות.
המצבים S1 - S3 הם כרגע העיקריים שבהם, הנתונים הנומינליים עבורם נכללים על ידי מפעלי הרכב החשמליים המקומיים בקטלוגים ובדרכון של המכונה.
קרא עוד על זה כאן: מצבי הפעלה של מנועים חשמליים
לבחירת מנוע סבירה מבחינת הספק, יש צורך לדעת כיצד עומס גל המנוע משתנה לאורך זמן, מה שבתורו מאפשר להעריך את אופי השינוי בהפסדי ההספק.
בנוסף, יש צורך לקבוע כיצד מתקדם תהליך חימום המנוע כתוצאה משחרור הפסדי אנרגיה בו. גישה זו מאפשרת לך לבחור את המנוע בצורה כזו שהטמפרטורה המקסימלית של הבידוד המתפתל לא תעלה על הערך המותר. מצב זה הוא אחד העיקריים להבטחת פעולתו האמינה של המנוע לאורך חיי השירות שלו.
בחירת הספק של המנוע החשמלי חייבת להיעשות בהתאם לאופי העומסים על המכונה הפועלת. אופי זה מוערך משני נימוקים:
-
לפי אופן הפעולה הנומינלי;
-
באמצעות שינויים בכמות האנרגיה הנצרכת.
כוח המנוע חייב לעמוד בשלושה תנאים:
-
חימום רגיל במהלך הפעולה;
-
קיבולת עומס יתר מספקת;
-
מומנט התחלה מספק.
הבחירה של מנועים חשמליים עם מה שנקרא"עתודת כוח", המבוססת על העומס הגדול ביותר האפשרי לפי לוח הזמנים, מביאה לחוסר ניצול של המנוע החשמלי, ולפיכך להגדלת עלויות ההון ועלויות התפעול עקב הפחתת מקדמי הספק ויעילות. עלייה מופרזת בכוח המנוע יכולה גם להוביל לטלטולים בזמן האצה.
אם המנוע החשמלי חייב לעבוד במשך זמן רב עם עומס קבוע או משתנה מעט, אז קביעת כוחו אינה קשה ומתבצעת על פי הנוסחאות. הרבה יותר קשה לבחור את הכוח של מנועים חשמליים במצבי פעולה אחרים.

העומס לטווח קצר מאופיין בכך שתקופות ההכללה קצרות, וההפסקות מספיקות לקירור מוחלט של המנוע החשמלי. במקרה זה, ההנחה היא כי העומס על המנוע החשמלי במהלך תקופות המיתוג נשאר קבוע או כמעט קבוע.
על מנת שהמנוע החשמלי ישמש נכון לחימום במצב זה, יש צורך לבחור בו כך שההספק הרציף שלו (המצוין בקטלוגים) קטן מההספק התואם לעומס לטווח קצר, כלומר. למנוע החשמלי יש עומס תרמי בתקופות פעולתו לטווח קצר...
אם תקופות הפעולה של המנוע החשמלי קצרות משמעותית מהזמן הנדרש לחימום המלא שלו, אך ההפסקות בין תקופות ההפעלה קצרות משמעותית מזמן הקירור המלא, אזי ישנה טעינה קצרת טווח חוזרת.
חישוב הספק ובחירת מנוע לפעולה רציפה
עם עומס פיר קבוע או משתנה מעט, הספק המנוע צריך לעלות רק במעט על כוח העומס.במקרה זה יש לעמוד בתנאי
Pn ≥ P,
כאשר Pn הוא הספק המנוע המדורג; P - כוח עומס. בחירת מנוע מסתכמת בבחירתו מהקטלוג.
בחירת כוח מנוע לפעולה רציפה. אם המומנט והכוח של מנגנון הייצור אינם משתנים, יש לבחור מנוע עם הספק נומינלי Pn השווה להספק העומס, תוך התחשבות בהפסדים בתמסורת (תיבת הילוכים):
Pn ≥ Pm /ηt, W
כאשר ηt הוא יעילות ההילוכים (תיבת הילוכים).
ברגע נתון של התנגדות של מנגנון ההנעה Ms, N ∙ m ותדירות הסיבוב של פיר המוצא של תיבת ההילוכים n2, סל"ד
Pm = Mc ∙ ω2, W
כאשר ω2 = 2π ∙ n2 / 60, רד / s
עבור מנגנוני ייצור מסוימים הפועלים במצב רציף עם רגע קבוע של התנגדות פיר, יש נוסחאות משוערות לקביעת הספק של מנועים.
חישוב הספק ובחירת מנוע לעומס לטווח קצר
מנועים לפעולה קצרת טווח של הכונן החשמלי נבחרים בהתאם להספק המדורג שלהם, אשר חייב להיות שווה להספק העומס, תוך התחשבות במשך הפעולה. ערכים מותרים סטנדרטיים למנועים המיוצרים על ידי התעשייה להפעלה קצרת טווח הם 10, 30, 60, 90 דקות.
בהיעדר מנועים לסירוגין, ניתן להתקין מנועים לסירוגין. במקרה זה, זמן ריצה של 30 דקות מתאים למחזור עבודה = 15%, 60 דקות תואמות למחזור עבודה = 25%, ו-90 דקות מקבילות למחזור עבודה = 40%.כמוצא אחרון, ניתן להשתמש במנועים לפעולה רציפה עם Pn < P ובדיקתם לאחר מכן עבור תנאים תרמיים.
חישוב הספק ובחירת מנוע לעומס לסירוגין
עבור כונן חשמלי הפועל במצב לסירוגין, הספק המנוע מחושב באמצעות שיטת ההפסד הממוצע או ערכים מקבילים. השיטה הראשונה מדוייקת יותר, אך דורשת יותר עבודה. נוח יותר להשתמש בשיטה של ערכים שווה ערך. בהתאם ללוח העומס הנתון P = f (t), M = f (t), I = f (t), נקבעים ערכי הריבוע הממוצעים, שהם נקרא שווה ערך.
הספק שווה ערך הוא הספק ה-RMS של דיאגרמת העומס
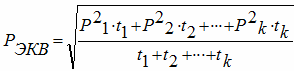
כאשר t1, t2, …, tk - מרווחי זמן שבהם הספק העומס שווה ל-P1, P2, …, Pk, בהתאמה.
על פי הקטלוג, עבור הערכים המתקבלים של Reqv ו-PV, ההספק הנקוב של המנוע נבחר מהמצב Pn ≥ REKV.
אם ניתן הדיאגרמה M = f (t), אז המומנט המקביל
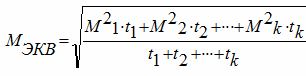
וההספק המקביל במהירות n ניתן על ידי הביטוי
Req = Meq • n / 9550 (kW).
אם ניתן הדיאגרמה I = f (t), הזרם של שווה ערך החימום
הערך המחושב של PVr שונה לעתים קרובות מהערכים הסטנדרטיים, לכן או שהערך המתקבל של PVr מעוגל לערך הסטנדרטי הקרוב ביותר, או שההספק המקביל מחושב מחדש באמצעות הנוסחה
במהלך הפעולה, נצפים עומסי יתר לטווח קצר העולים על ההספק הנומינלי של המנוע. הם אינם משפיעים באופן משמעותי על חימום המנועים, אך עלולים להוביל לפעולה לא נכונה או לעצירה. לכן, יש לבדוק את קיבולת עומס יתר של המנוע לפי הביטוי
Pm / Pn = ku ∙ Mm / Mn,
כאשר Pm הוא ההספק הגבוה ביותר בתרשים העומס; Mm / Mn - הכפולה של המומנט המרבי נקבעת על ידי הקטלוג; מקדם ku = 0.8 לוקח בחשבון את ירידת המתח האפשרית ברשת.
אם תנאי זה אינו מתקיים, יש לבחור מנוע בעל הספק גבוה יותר מהקטלוג ולבדוק שוב את קיבולת עומס יתר.
ראה גם בנושא זה: בחירת מנוע לפעולה לסירוגין

התעשייה מייצרת מספר סדרות של מנועי עומס לסירוגין:
-
מנופים אסינכרוניים עם רוטור סנאי בסדרת MTKF ועם רוטור פאזה בסדרת MTF;
-
סדרות מתכות דומות MTKN ו-MTN;
-
DC סדרה D.
המכונות של הסדרה המצוינת מאופיינות בצורת רוטור (עוגן) מוארך, המספק הפחתה במומנט האינרציה. על מנת לצמצם את ההפסדים המשתחררים בפיתול הסטטור במהלך ארעיות, למנועים מסדרות MTKF ו-MTKN יש החלקה נומינלית מוגברת snom = 7 ÷ 12%. קיבולת עומס יתר של המנועים מסדרת העגורן והמטלורגית היא 2.3 - 3 במחזור עבודה = 40%, אשר במחזור עבודה = 100% מתאים ל- λ = Mcr / Mnom100 = 4.4-5.5.