מדי פאזות - מטרה, סוגים, מכשיר ועקרון הפעולה
 מכשיר מדידה חשמלי נקרא מד פאזה, שתפקידו למדוד את זווית הפאזה בין שתי תנודות חשמליות בתדירות קבועה. לדוגמה, באמצעות מד פאזור, ניתן למדוד את זווית הפאזה ברשת מתח תלת פאזית. מדי פאזות משמשים לעתים קרובות כדי לקבוע את גורם ההספק, קוסינוס phi, של כל התקנה חשמלית. לפיכך, מדי פאזה נמצאים בשימוש נרחב בפיתוח, הפעלה ותפעול של מכשירים ומכשור חשמלי ואלקטרוני שונים.
מכשיר מדידה חשמלי נקרא מד פאזה, שתפקידו למדוד את זווית הפאזה בין שתי תנודות חשמליות בתדירות קבועה. לדוגמה, באמצעות מד פאזור, ניתן למדוד את זווית הפאזה ברשת מתח תלת פאזית. מדי פאזות משמשים לעתים קרובות כדי לקבוע את גורם ההספק, קוסינוס phi, של כל התקנה חשמלית. לפיכך, מדי פאזה נמצאים בשימוש נרחב בפיתוח, הפעלה ותפעול של מכשירים ומכשור חשמלי ואלקטרוני שונים.
כאשר הפאזור מחובר למעגל הנמדד, המכשיר מחובר למעגל המתח ולמעגל מדידת הזרם. עבור רשת אספקה תלת פאזית, הפאזור מחובר על ידי מתח לשלושה פאזות, ועל ידי זרם לפיתולים המשניים של שנאי זרם גם בשלושה שלבים.
בהתאם למכשיר של מד הפאזה, אפשרית גם סכימה פשוטה של החיבור שלו, כאשר היא מחוברת גם לשלושה שלבים על ידי מתח, ועל ידי זרם - לשני פאזות בלבד.השלב השלישי מחושב לאחר מכן על ידי הוספת הוקטורים של שני זרמים בלבד (שני פאזות נמדדות). מטרת מד הפאזה - מדידת קוסינוס פי (גורם הספק), אז בשפה הרגילה הם נקראים גם "מטרי קוסינוס".
כיום ניתן למצוא מדי פאזה משני סוגים: אלקטרודינמי ודיגיטלי. מדי פאזה אלקטרודינמיים או אלקטרומגנטיים מבוססים על תוכנית פשוטה עם מנגנון פרופורציונלי למדידת הסטת פאזה. שתי מסגרות המחוברות זו לזו בצורה נוקשה, שהזווית ביניהן היא 60 מעלות, מקובעות על הצירים בתומכים ואין מומנט מכני מנוגד.
בתנאים מסוימים, אשר נקבעים על ידי שינוי הסטת הפאזה של הזרמים במעגלים של שתי מסגרות אלה, כמו גם את זווית ההתקשרות של מסגרות אלה זו לזו, החלק הנייד של מכשיר המדידה מסובב בזווית שווה לזווית הפאזה. הסולם הליניארי של המכשיר מאפשר לך לרשום את תוצאת המדידה.
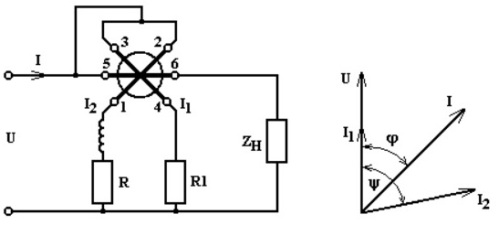
בואו נסתכל על עקרון הפעולה של מד פאזה אלקטרודינמי. יש לו סליל קבוע של זרם I ושני סלילים נעים. זרמים I1 ו-I2 זורמים דרך כל אחד מהסלילים הנעים. הזרמים הזורמים יוצרים שטפים מגנטיים הן בסליל הנייח והן בסלילים הנעים. בהתאם לכך, השטפים המגנטיים המקיימים אינטראקציה של הסלילים מייצרים שני מומנטים M1 ו-M2.
הערכים של רגעים אלה תלויים במיקום היחסי של שני הסלילים, בזווית הסיבוב של החלק הנע של מכשיר המדידה, והרגעים הללו מכוונים לכיוונים מנוגדים.הערכים הממוצעים של המומנטים תלויים בזרמים הזורמים בסלילים הנעים (I1 ו-I2), בזרם הזורם בסליל הנייח (I), בזוויות הזזת הפאזה של הזרמים של הסלילים הנעים ביחס ל- זרם בסליל הנייח (ψ1 ו-ψ2) ועל הפיתולים של פרמטרי התכנון.
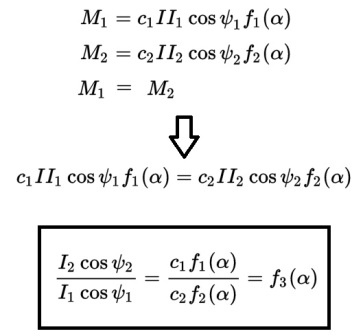
כתוצאה מכך, החלק הנייד של המכשיר מסתובב תחת פעולתם של רגעים אלו עד שנוצר שיווי משקל, הנגרם על ידי שוויון המומנטים הנובעים מהסיבוב. ניתן לכייל את סולם מד הפאזה במונחים של גורם הספק.
החסרונות של מדי פאזה אלקטרודינמיים הם התלות של הקריאות בתדר וצריכת אנרגיה משמעותית מהמקור הנחקר.
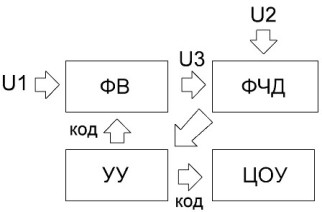
ניתן ליישם מדי פאזה דיגיטליים במגוון דרכים. לדוגמה, למד פאזה פיצוי יש רמת דיוק גבוהה למרות שהוא מופעל במצב ידני. עם זאת, שקול כיצד הוא עובד. ישנם שני מתחים סינוסואידים U1 ו-U2, את מעבר הפאזה שביניהם אתה צריך לדעת.
המתח U2 מסופק למחליף הפאזה (PV), אשר נשלט על ידי קוד מיחידת הבקרה (UU). שינוי הפאזה בין U3 ל-U2 משתנה בהדרגה עד שמגיעים למצב שבו U1 ו-U3 נמצאים בשלב. על ידי התאמת הסימן של מעבר הפאזה בין U1 ל-U3, הגלאי הרגיש לשלב (PSD) נקבע.
אות המוצא של הגלאי הרגיש לפאזה מוזן ליחידת הבקרה (CU). אלגוריתם האיזון מיושם בשיטת קוד הדופק. לאחר השלמת תהליך האיזון, קוד ה-phase shift factor (PV) יבטא את הסטת הפאזה בין U1 ל-U2.
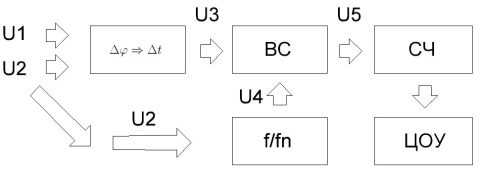
רוב מדי הפאזה הדיגיטליים המודרניים משתמשים בעיקרון של ספירה בדידה.שיטה זו פועלת בשני שלבים: המרת הסטת הפאזה לאות של משך מסוים, ולאחר מכן מדידת משך הדופק הזה באמצעות מספר בדיד. המכשיר מכיל ממיר פאזה לפולס, בורר זמן (VS), פולס עיצוב בדיד (f/fn), מונה (MF) ו-DSP.
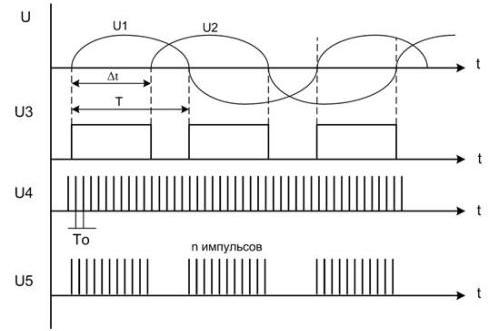
ממיר פאזה לפולס נוצר מ-U1 ו-U2 עם הסטת פאזה Δφ פולסים מלבניים U3 כרצף. לפולסים אלה U3 יש קצב חזרות ומחזור עבודה התואמים את התדירות והיסט הזמן של אותות הכניסה U1 ו-U2. פולסים U4 ו-U3 יוצרים פולסי חישה נפרדים של תקופה T0 המופעלים על בורר הזמן. בורר הזמן בתורו נפתח למשך הפולסים U3 ועובר במחזוריות בין הפולסים U4. כתוצאה מהפלט של בורר הזמן, מתקבלים פרצי פולסים U5, שתקופת החזרה שלהם היא T.
המונה (MF) סופר את מספר הפולסים בחבילה הטורית U5, וכתוצאה מכך מספר הפולסים המתקבלים במונה (MF) הוא פרופורציונלי להיסט הפאזה בין U1 ל-U2. הקוד מהמונה נשלח למרכז הבקרה המרכזי, והקריאות של המכשיר מוצגות במעלות בדיוק של עשיריות, המושגת לפי מידת שיקול הדעת של המכשיר. שגיאת הדיסקרטיות קשורה ליכולת למדוד Δt בדיוק של תקופת ספירת פולסים אחת.
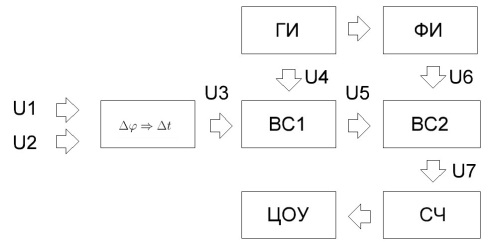
מדי פאזה אלקטרוניים דיגיטליים של קוסינוס phi ממוצעים יכולים להפחית את השגיאה על ידי ממוצע על פני מספר תקופות T של אות הבדיקה.המבנה של מד הפאזה הממוצע הדיגיטלי שונה מספירת המעגלים הבדידים על ידי נוכחותם של בורר זמן נוסף (BC2), כמו גם מחולל דופק (GP) ומחולל דופק בדידות (PI).
כאן, ממיר הסטת הפאזה U5 כולל מחולל פולסים (PI) ובורר זמן (BC1). במשך פרק זמן מכויל Tk, גדול בהרבה מ-T, מוזנות למכשיר מספר מנות, שבפלט שלהן נוצרות מספר מנות, זה הכרחי לביצוע ממוצע של התוצאות.
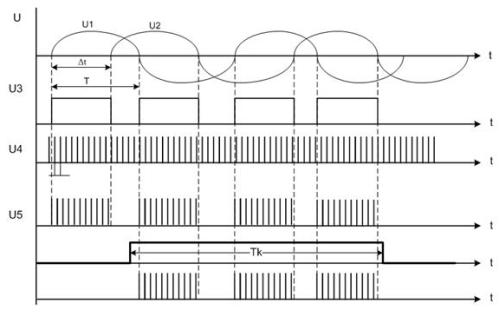
לפולסים U6 יש משך זמן שהוא כפולה של T0, מכיוון שמעצב הפולסים (PI) פועל על פי העיקרון של חלוקת התדר בגורם נתון. פעימות אות U6 פותחות את בורר הזמן (BC2). כתוצאה מכך, מספר מנות מגיעות לקלט שלה. האות U7 מוזן למונה (MF) שמחובר למרכז הבקרה המרכזי. הרזולוציה של המכשיר נקבעת על ידי הסט של U6.
השגיאה של מד הפאזה מושפעת גם מהדיוק הלקוי של תיקון הסטת הפאזה על ידי הממיר במהלך מרווח הזמן של רגעי המעבר של האותות U2 ו-U1 דרך אפסים. אבל אי דיוקים אלה מצטמצמים כאשר מבצעים ממוצע של תוצאת חישובים עבור תקופה Tk, שהיא הרבה יותר גדולה מהתקופה של אותות הקלט הנחקרים.
אנו מקווים שמאמר זה עזר לך לקבל הבנה כללית כיצד פועלים מדי פאזה. תמיד תוכל למצוא מידע מפורט יותר בספרות המיוחדת, שלמרבה המזל, יש היום הרבה ממנה באינטרנט.