הנעה חשמלית של מנופים חשמליים וקורות מנוף
 עגלות חשמליות תלויות (מנופים מחושמלים, מנופים וקורות מנוף) משמשות להרמה והנעה של מטענים וחלקי מכונות במהלך עבודות הרכבה ותיקון בחצרים תעשייתיים. מנופים חשמליים, מנופים ומנופים קטנים יותר מנופי גשר, מה שמקטין את גודלם של מבני תעשייה ותחזוקתם אינו מצריך כוח אדם מוסמך.
עגלות חשמליות תלויות (מנופים מחושמלים, מנופים וקורות מנוף) משמשות להרמה והנעה של מטענים וחלקי מכונות במהלך עבודות הרכבה ותיקון בחצרים תעשייתיים. מנופים חשמליים, מנופים ומנופים קטנים יותר מנופי גשר, מה שמקטין את גודלם של מבני תעשייה ותחזוקתם אינו מצריך כוח אדם מוסמך.
עגלות חשמליות תלויות מיועדות להרמה והעברת סחורות במתקני ייצור לאורך נתיב מוגדר בהחלט.
משאית חשמלית (איור 1) מורכבת מ-3 חלקים עיקריים: מנגנון הרמה (הרמה חשמלית) שנועד להרים (להוריד) ולהחזיק את המטען, מנגנון תנועה (תחתון) שנועד להזיז את המטען המורם לכיוון מיקום מוגדר בהחלט. , מונורייל המגדיר תנועה אופקית בשני כיוונים.
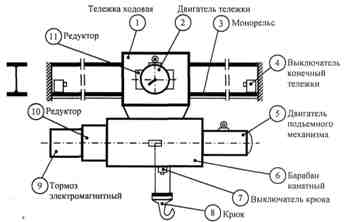
אורז. 1. תרשים קינמטי של הכרכרה החשמלית התלויה
המנוף החשמלי מותקן על עגלת עבודה וכולל את הציוד הבא: מנוע חשמלי (5) של מנגנון ההרמה, תיבת הילוכים גלילית (10) להורדת מהירות הסיבוב של המנוע החשמלי לערך המספק מהירות ליניארית נתונה של הרמת (הורדת) הוו, בלם אלקטרומגנטי (9), לעצירת מנוע הציר כשהוא מנותק מהרשת או שהמתח נעלם ברשת, מופעל בלם בלימה, הפועל על כוח הקפיצים, כאשר הצירים כרוכים סביב הפיר, מתג הגבול (7) של הקרס, כדי להגביל את הרמת הקרס, בלחיצה, המנוע מנותק מהרשת ומאט, תוף החבל (6), לליפוף ( התפרקות) ואחסון החבל, הוו (8), לאבטחת המטען המורם.
המרכב התחתון מותקן על המונורייל (3), נתמך על ידי גלגלי הריצה על האוגנים התחתונים של המסילה הכפולה. הנעת הגלגלים דרך תיבת הילוכים גלילית (11) על ידי מנוע חשמלי (2).
מונורייל - קרן I עם מתגי הגבלה (4) בקצוות להגבלת תנועה אופקית.
מנוף חשמלי TEP-1 (קיבולת עומס 1 t, מתח 380 V) מורכב ממנגנוני הרמה והנעה עם כוננים חשמליים בודדים. תוף העבודה 2 מונע על ידי המנוע 20 דרך תיבת הילוכים פלנטרית המורכבת מלוויינים 5, 7, 8, גלגלי שיניים בלוק 13, גלגלי שיניים שמש 6, 9, מנשא 14, 15. גל ההינע הראשי 4 כאשר המנוע כבוי מופסק על ידי דיסקים 10 תחת פעולת קפיץ 11.
כדי להניע את מנגנון ההרמה במהירות של 6.5-6.9 מ' לשנייה, נעשה שימוש במנוע אסינכרוני עם החלקה מוגברת מסוג AOS-32-4M (הספק 1.4 קילוואט ב-1320 סל"ד ומחזור עבודה = 25%).התנועה כלפי מעלה של הקרס מוגבלת על ידי מתג הגבלה.
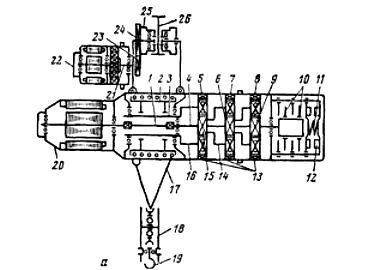
אורז. 2. הנעה חשמלית של מנוף חשמלי TEP -1: 1 - תוף עבודה, 3 - פיר חלול, 4 - פיר עבודה, 5, 7, 8 - לוויינים, 6, 9, 15 - גלגלי שמש, 10 - דיסקי בלמים, 11 - קפיץ בלם, 12 - אלקטרומגנטים, 13 - גלגלי שיניים בלוק, 14, 16, 21 - מנשאים, 17 - כבל, 18 - מתלה, 19 - וו, 20 - מנוע חשמלי להרמת עומס, 22 - מנוע חשמלי עגלה, 23, 24 - הילוכים, 25 - רולר, 26 - מונורייל.
איור 3 מציג את פעולת המנוף. יעילות המנוף החשמלי עולה ל-0.58 ככל שמסת המטען המורם עולה ל-1000 ק"ג.
מצב פעולה מעניין של מנוע 4 בהורדת העומס: בעוד משקל העומס נמוך מ-425 ק"ג, המנוע החשמלי פועל במצב מנוע, וכאשר המסה היא מעל 425 ק"ג - במצב גנרטור. לכן, כדי להתגבר על רגע הסרק של מנגנון ההרמה, מספיק עומס במשקל 425 ק"ג.
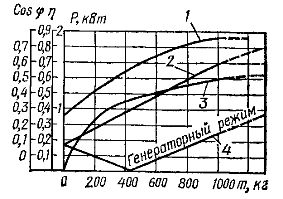
אורז. 3. מאפייני הפעלה של מנוף חשמלי: 1 - ssphi של המנוע החשמלי, 2 - הספק המנוע החשמלי בעת הרמת העומס, 3 - יעילות, 4 - הספק המנוע החשמלי בהורדת העומס.
להנעת המרכב התחתון של המנוף החשמלי, מנוע חשמלי אסינכרוני 22 (איור 2) מסוג TEM-0.25 (הספק 0.25 קילוואט ב-1410 סל"ד ומחזור עבודה = 25%) עם תיבת הילוכים פלנטרית חד-שלבית מובנית ו הילוך 23, 24, העברת סיבוב של גלילים 25. התקני בלימה אינם מותקנים על מנגנוני התנועה של המנוף הפשוט ביותר. תנועת המנוף לאורך הקורה בשני הכיוונים מוגבלת על ידי עצירות מכניות.
 מנוף זרוע נבדל ממנוף בכך שהקורה שעליה נוסע המנוף יכולה לנוע ברחבי חדר הייצור, מונעת על ידי מנוע חשמלי של כלוב סנאי או רוטור פאזה. גשר קורות העגורן, בעל מנגנון הנעה חשמלי, עשוי בצורת קורה בודדת שעליה נע המרכב החשמלי.
מנוף זרוע נבדל ממנוף בכך שהקורה שעליה נוסע המנוף יכולה לנוע ברחבי חדר הייצור, מונעת על ידי מנוע חשמלי של כלוב סנאי או רוטור פאזה. גשר קורות העגורן, בעל מנגנון הנעה חשמלי, עשוי בצורת קורה בודדת שעליה נע המרכב החשמלי.
מנועים אסינכרוניים תלת פאזיים עם רוטור כלוב סנאי משמשים להנעת מכוניות חשמליות חיצוניות ורק עם כושר עומס גבוה וצורך בוויסות מהירות ו"נחיתה" חלקה של מנועים אסינכרוניים עומסים עם רוטור פאזה.
בשל היעדר מהירות נמוכה הנחוצה לנחיתה חלקה של מטענים או עצירה מדויקת של העגורן, על העובד להפעיל ולכבות מעת לעת את המנועים החשמליים, וזה מגדיל את מספר ההתחלות וגורם לחימום הפיתולים, וגם מפחית את עמידות בפני שחיקה של המגעים. לכן, בחלק מהמנופים ישנם כוננים חשמליים להרמה ונסיעה בשתי מהירויות פעולה: נומינליות ומופחתות, הניתנות באמצעות מנועים אסינכרוניים דו-הילוכים במקום חד-מהירות או מיקרו-כונן נוסף.
 עגלות חשמליות תלויות במהירות נמוכה (0.2 - 0.5 מ' לשנייה) המופעלות על ידי מנועי כלוב סנאי נשלטות בדרך כלל מגובה הרצפה (הקרקע) באמצעות תלויים תחנות כפתור... בעגלות אוויר ומנופים עם תא למפעיל (במהירות של 0.8 - 1.5 מ'/ש'), המנועים עם רוטור פאזה נשלטים על ידי בקרים.
עגלות חשמליות תלויות במהירות נמוכה (0.2 - 0.5 מ' לשנייה) המופעלות על ידי מנועי כלוב סנאי נשלטות בדרך כלל מגובה הרצפה (הקרקע) באמצעות תלויים תחנות כפתור... בעגלות אוויר ומנופים עם תא למפעיל (במהירות של 0.8 - 1.5 מ'/ש'), המנועים עם רוטור פאזה נשלטים על ידי בקרים.
המנועים החשמליים של המנוף והמנופים העיליים נשלטים על ידי סטרטרים מגנטיים הפיכים וכפתורי הפעלה תלויים בכבל משוריין גמיש.המתח לסלילים ולמגעים של המגעים להעלאת KM1 (איור 4), הורדת KM2, הזזת KMZ קדימה ואחורה KM4 מסופק דרך מפסק חשמל וכבל או חוטי מגע. התנועה כלפי מעלה של מכשיר ההרמה מוגבלת על ידי מתג גבול. SQ.
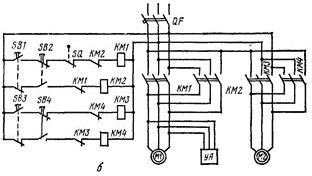
אורז. 4. תרשים סכמטי חשמלי של קורת העגורן
חסימת מגעים הפוכים של מנועים מפני הפעלה בו-זמנית מתבצעת באמצעות לחצני מעגלים כפולים וחסימה מכנית של המגעים עצמם (או פתיחת מגעי עזר של מגע).
במנופים חשמליים ובמנופים עיליים, לחצני ההתנעה אינם עוקפים על ידי מגעי השתלבות המגע הסגירה המתאימים, ומונעים מהמנוף להמשיך לפעול לאחר שהמפעיל משחרר את עמדת התלייה של הכפתור. במקביל למנוע ההרמה, מופעל הסולנואיד UA הפותח את הבלם.
זמן ההתחלה המרבי המותר למנגנוני הרמה הוא 3 - 5 שניות, עבור מנגנוני תנועה - 10 - 15 שניות.
אתה יכול גם לראות: ציוד חשמלי ושרשראות של מנפים חשמליים
אופן הפעולה של המנועים של משאיות חשמליות, מנופים חשמליים ומנופים עיליים תלוי במטרתם. אם הסחורה מועברת על מנופי גשר למרחקים קצרים, אזי המנועים פועלים במצב מביש לטווח קצר (לדוגמה, בעגלות המשרתות חלקים של בתי מלאכה או מחסנים).

עבור מנופים עיליים המובילים סחורות על פני שטח המפעל על פני מרחקים גדולים יחסית, מצבי הפעולה של מנועי ההרמה והנעים שונים: הראשון מאופיין במצב קצר טווח, השני במצב ארוך טווח. של המנועים להרמה והנעת מנופים חשמליים, מנופים ומנופי גג נקבעים באותו אופן כמו למנועים של מנגנוני מנוף עיליים.