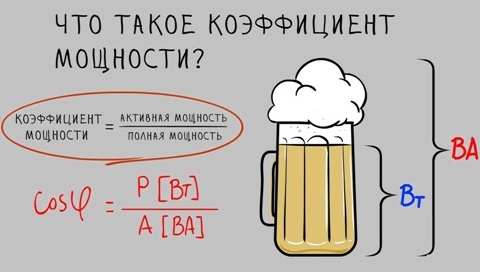
מהו גורם כוח (Cosine Phi)
 גורם הכוח של אדם טבעי (קוסינוס phi) הוא כדלקמן. כפי שאתה יודע, במעגל AC, ישנם בדרך כלל שלושה סוגים של עומס או שלושה סוגים של כוח (שלושה סוגי זרם, שלושה סוגי התנגדות). כוח P פעיל, Q תגובתי וסך הכל C קשורים להתנגדות r פעילה, x תגובתי וסך הכל z, בהתאמה.
גורם הכוח של אדם טבעי (קוסינוס phi) הוא כדלקמן. כפי שאתה יודע, במעגל AC, ישנם בדרך כלל שלושה סוגים של עומס או שלושה סוגים של כוח (שלושה סוגי זרם, שלושה סוגי התנגדות). כוח P פעיל, Q תגובתי וסך הכל C קשורים להתנגדות r פעילה, x תגובתי וסך הכל z, בהתאמה.
מהקורס של הנדסת חשמל ידוע שההתנגדות נקראת אקטיבית, שבה משתחרר חום כאשר זרם עובר. התנגדות פעילה קשורה לאובדי הספק פעילים dPnשווה לריבוע הזרם כפול ההתנגדות dPn = Az2r W
תגובה כאשר זרם זורם דרכו, הוא לא גורם להפסדים. התנגדות זו נובעת משראות L וכן מקיבול C.
התנגדות אינדוקטיבית וקיבולית הם שני סוגים של תגובתיות ומבוטאות בנוסחאות הבאות:
-
תגובתיות או התנגדות אינדוקטיבית,
-
התנגדות קיבולית או קיבול,
אז x = xL — НС° С… לדוגמה, אם במעגל xL= 12 אוהם, xc = 7 אוהם, אז התגובה של המעגל x = xL — NSc= 12 — 7 = 5 אוהם.
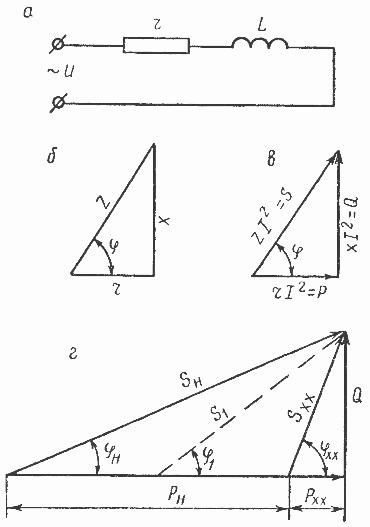
אורז. 1. איורים להסבר המהות של הקוסינוס «phi»: a - מעגל של חיבור סדרתי של r ו-L במעגל זרם חילופין, b - משולש התנגדות, c - משולש הספק, d - משולש הספק בערכים שונים של כוח פעיל.
העכבה z כוללת התנגדות ותגובתיות. עבור חיבור סדרתי של r ו-L (איור 1, a), משולש התנגדות מתואר בצורה גרפית.
אם צלעות המשולש הזה מוכפלות בריבוע של אותו זרם, אז היחס לא ישתנה, אבל המשולש החדש יהיה משולש קיבולת (איור 1, ג). בדוק פרטים נוספים כאן - משולשי התנגדויות, מתחים והספקים
כפי שניתן לראות מהמשולש, במעגל AC, מתרחשים בדרך כלל שלושה כוחות: P פעיל, Q תגובתי וסך הכל S
P = Az2r = UIcosphy W,B = Az2x = Az2NSL — I2x° C = UIsin Var, S = Az2z = UIWhat.
כוח פעיל יכול להיקרא כוח עבודה, כלומר, הוא "מחמם" (פליטת חום), "אור" (תאורה חשמלית), "זז" (הנעי מנוע חשמלי) וכו' הוא נמדד באותו אופן כמו הספק קבוע , בוואטים.
מפותח כוח פעילב לחלוטין ללא עקבות נצרך במקלטים ובחוטי עופרת במהירות האור - כמעט באופן מיידי. זוהי אחת התכונות האופייניות של כוח פעיל: ככל שהוא נוצר, כל כך הרבה נצרך.
הספק תגובתי Q אינו נצרך ומייצג את תנודת האנרגיה האלקטרומגנטית במעגל חשמלי.זרימת האנרגיה מהמקור למקלט ולהיפך קשורה לזרימת הזרם דרך החוטים, ומכיוון שלחוטים יש התנגדות אקטיבית, יש בהם הפסדים.
לפיכך, עם כוח תגובתי, העבודה לא מתבצעת, אבל הפסדים מתרחשים, אשר עבור אותו כוח פעיל, גדול יותר, קטן יותר גורם ההספק (קוספי, קוסינוס «פי»).
דוגמה. קבע את אובדן ההספק בקו עם התנגדות rl = 1 אוהם אם הספק P = 10 קילוואט מועבר דרכו במתח של 400 וולט פעם אחת ב- cosphi1 = 0.5 ובפעם השנייה ב- cosphi2 = 0.9.
תשובה. זרם במקרה הראשון I1 = P / (Ucosphi1) = 10/(0.4•0.5) = 50 A.
אובדן הספק dP1 = Az12rl = 502•1 = 2500 W = 2.5 קילוואט.
במקרה השני, הנוכחי Az1 = P / (Ucosphi2) = 10/(0.4•0.9) = 28 A.
אובדן הספק dP2 = Az22rl = 282•1 = 784 W = 0.784 קילוואט, כלומר. במקרה השני אובדן הכוח קטן פי 2.5 / 0.784 = פי 3.2 רק בגלל שערך cosfi גבוה יותר.
החישוב מראה בבירור שככל שהערך של הקוסינוס «phi» גבוה יותר, כך אובדן האנרגיה נמוך יותר ופחות הצורך למקם מתכות לא ברזליות בעת התקנת מתקנים חדשים.

על ידי הגדלת הקוסינוס «phi» יש לנו שלוש מטרות עיקריות:
1) חיסכון באנרגיה חשמלית,
2) שמירת מתכות לא ברזליות,
3) שימוש מרבי בכוח המותקן של גנרטורים, שנאים ובאופן כללי מנועי AC.
הנסיבות האחרונות מאושרות על ידי העובדה, למשל, מאותו שנאי ניתן להשיג ככל שהספק פעיל יותר, כך גדל הערך של משתמשי cosfi.לכן, משנאי עם הספק מדורג Sn= 1000 kVa ב-cosfi1 = 0.7 אתה יכול לקבל את ההספק הפעיל P1 = Снcosfie1 = 1000 • 0.7 = 700 קילוואט, וב-cosfi2 = 0.95 R2 = Сncosfi2= 05 095 • Сncosfi2= 05. קילוואט.
בשני המקרים השנאי יהיה טעון מלא עד 1000 קילוואט. מנועי אינדוקציה ושנאי תת עומס הם הגורם לגורם הספק נמוך במפעלים. לדוגמה, למנוע אינדוקציה במהירות סרק יש cosfixx שווה בקירוב ל-0.2, בעוד כשהוא מועמס להספק נקוב של sfin = 0.85.
לבהירות רבה יותר, שקול משולש כוח משוער עבור מנוע אינדוקציה (איור 1, ד). בזמן פעולת סרק, מנוע האינדוקציה צורך כוח תגובתי השווה בקירוב ל-30% מההספק הנקוב, בעוד שההספק הפעיל הנצרך במקרה זה הוא כ-15%. לכן, מקדם ההספק נמוך מאוד. ככל שהעומס גדל, ההספק הפעיל גדל וההספק התגובתי משתנה באופן שולי ומכאן שהקוספי גדל. קרא עוד על זה כאן: גורם כוח כונן
עיקר הפעילות המעלה את ערך הקוספיות פועלת בכושר ייצור מלא. במקרה זה, מנועים אסינכרוניים יפעלו עם גורמי הספק קרובים לערכים הנומינליים.
פעילויות שיפור גורמי הכוח מחולקות לשתי קבוצות עיקריות:
1) אינו דורש התקנה של התקני פיצוי ומתאימים בכל המקרים (שיטות טבעיות);
2) הקשורים לשימוש במכשירי פיצוי (שיטות מלאכותיות).
 יחידת עיבוי להגדלת מקדם ההספק
יחידת עיבוי להגדלת מקדם ההספק
פעילות הקבוצה הראשונה, על פי ההנחיות העדכניות, כוללת רציונליזציה של התהליך הטכנולוגי, המוביל לשיפור מצב האנרגיה של הציוד והגדלת גורם ההספק. אותם אמצעים כוללים שימוש במנועים סינכרוניים במקום כמה אסינכרונים (מומלצת התקנה של מנועים סינכרוניים במקום אסינכרונים במידת הצורך כדי להגביר את היעילות).
קרא גם בנושא זה: ספק כוח AC ואיבודי חשמל