הפוך ועצור מנוע אינדוקציה של כלוב סנאי
מנוע אינדוקציה הוא מכונה הפיכה. כדי לשנות את כיוון הסיבוב של הרוטור, יש צורך לשנות את כיוון הסיבוב של השדה המגנטי (על ידי החלפת חוטי האספקה לטרמינלים של שני שלבי המנוע) - מעגלי התנעת מנוע ובלימה
המאפיינים המכניים של שני כיווני סיבוב מוצגים באיור. 1.
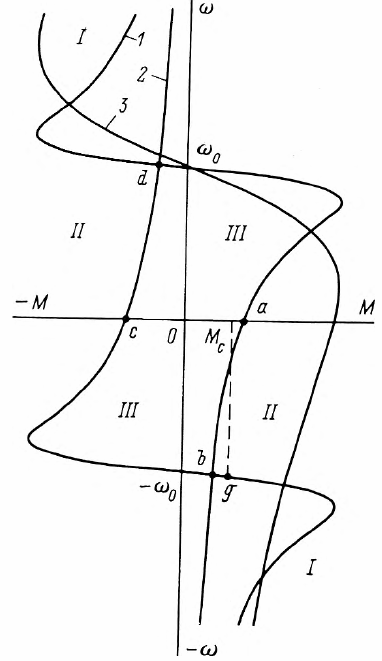
אורז. 1. משפחה של מאפיינים מכניים של מנוע אינדוקציה לפעולה הפיכה במצב עצירה עם אספקת אנרגיה לרשת (I), מצב אופוזיציה (II) ומנוע (III) 1, 2 - טבעי; 3 - מלאכותי.
מנוע אינדוקציה של כלוב סנאי יכול לשמש לא רק כמנוע אלא גם כבלם. במצב עצירה, כל מנוע חשמלי תמיד פועל כגנרטור. במקרה זה, מנוע חשמלי אינדוקציה עם רוטור כלוב סנאי יכול להיות בעל שלושה מצבי בלימה.
במצב בלימה רגנרטיבית, המכונה פועלת עם החלקה שלילית. במקרה זה, מהירות הרוטור עולה על מהירות הסיבוב של השדה המגנטי.כמובן, כדי לעבור למצב זה, יש להפעיל מומנט אקטיבי חיצוני על הצד של הפיר.
מצב המשוב נמצא בשימוש נרחב במתקני הרמה. במהלך הירידה, מערכת ההנעה, עקב האנרגיה הפוטנציאלית של העומס, יכולה לקבל מהירות העולה על מהירות הסיבוב של השדה המגנטי, והירידה תתרחש במצב שיווי משקל המתאים לנקודה מסוימת g במאפיין המכני. , כאשר המומנט הסטטי שנוצר על ידי העומס היורד, מאוזן על ידי מומנט בלימת המנוע.
בכוננים קונבנציונליים עם מומנט סטטי תגובתי, המצב המדובר מיושם רק באמצעות מעגלי בקרה מיוחדים, המאפשרים להפחית את מהירות הסיבוב של השדה המגנטי. המאפיינים המכניים של מכונת אינדוקציה למצב משוב מוצגים באותה איור. 1.
כפי שמוצג, המומנט המרבי במצב גנרטור מעט גבוה יותר מאשר במצב המנוע, וההחלקה הקריטית בערך המוחלט זהה.
למחוללים אסינכרוניים ככאלה יש טווח צר מאוד, כלומר תחנות כוח רוח... מאחר וכוח הרוח אינו קבוע ובהתאם לכך מהירות הסיבוב של המכשיר משתנה באופן משמעותי, עדיף גנרטור אסינכרוני בתנאים אלו.
הנפוץ ביותר הוא מצב הבלימה - אופוזיציה. המעבר למצב זה של מנועים אסינכרוניים, כמו גם מנועי DC, אפשרי בשני מקרים (איור 1): עם עלייה משמעותית במומנט הסטטי (סעיף ab) או בעת החלפת פיתול הסטטור לכיוון סיבוב שונה ( סעיף CD).
בשני המקרים, המנוע פועל בהחלקה גדולה מ-1 עד שהזרמים עולים על זרמי ההתחלה. לכן, עבור מנוע כלוב סנאי, ניתן להשתמש במצב זה רק כדי לעצור במהירות את הכונן.
כאשר מגיעים למהירות אפס, יש לנתק את המנוע מהרשת, אחרת הוא יטה להאיץ בכיוון ההפוך.
בעת בלימה על ידי מנועי רוטור מנוגדים, יש להכניס התנגדות ריאוסטטית למעגל הרוטור כדי להגביל את הזרם ולהגדיל את מומנט הבלימה.
זה גם אפשרי מצב בלימה דינמית... עם זאת, זה מעורר כמה קשיים. כאשר המנוע מנותק מהרשת, נעלם גם השדה המגנטי של המכונה. ניתן לעורר מכונת אינדוקציה ממקור זרם ישר אשר מחובר לסטטור מנותק מרשת זרם החילופין. המקור צריך לספק זרם בפיתול הסטטור קרוב לנומינלי. מכיוון שזרם זה מוגבל רק על ידי ההתנגדות החשמלית של הסליל, מתח מקור DC חייב להיות נמוך (בדרך כלל 10 - 12 וולט).
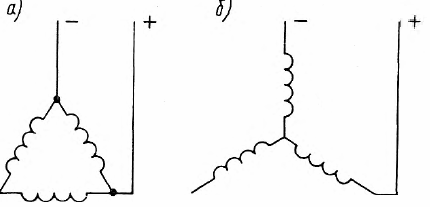
אורז. 2. חיבור הסטטור של מנוע אינדוקציה למקור DC במצב בלימה דינמית כשהוא מחובר בדלתא (א) וכוכב (ב)
עירור עצמי משמש גם לבלימה דינמית. הקבלים מחוברים לסטטור המנותק מהרשת.
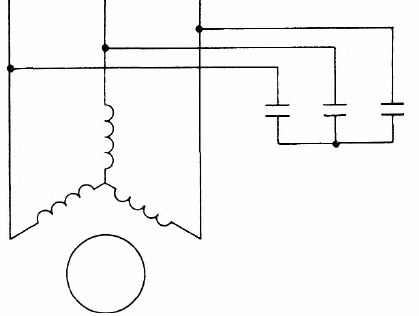
אורז. 3. סכמטי של בלימה דינמית של מנוע אינדוקציה מתרגש מעצמו
כאשר הרוטור מסתובב, נוצר EMF במעגל הסטטור עקב מגנטיזציה שיורית וזרימת זרם דרך פיתולי הסטטור כמו גם דרך הקבלים.כאשר מגיעים למהירות מסוימת במעגל הסטטור, מתרחשים תנאי תהודה: סכום ההתנגדויות האינדוקטיביות ישתווה להתנגדות הקיבולית. יתחיל תהליך אינטנסיבי של עירור עצמי של המכונה, שיוביל לעלייה ב-EMF. מצב העירור העצמי יסתיים כאשר EMF של המכונה E ומפל המתח על פני הקבלים יהיו שווים.
מומנט הבלימה המרבי עם הגדלת הקיבולת עובר למהירויות נמוכות יותר. החסרונות של מצב הבלימה הנחשב הם הופעת פעולת בלימה רק בתוך אזור מהירות מסוים והצורך להשתמש בקבלים גדולים לבלימה במהירויות נמוכות.
בצד החיובי, אין צורך במקור חשמל נוסף. מצב זה מיושם תמיד במתקנים שבהם מחובר בנק קבלים למנוע כדי לשפר את גורם ההספק של רשת האספקה.
ראה גם בנושא זה: מעגלי בלמים למנועים אסינכרוניים