מערכת גנרטור - מנוע DC
 כלי מכונות שונים דורשים לעתים קרובות שליטה חסרת שלבים של מהירות הנסיעה בטווח רחב יותר ממה שניתן לספק על ידי התאמת השטף המגנטי. מנוע DC עם עירור מקביל... במקרים אלה, נעשה שימוש במערכות הנעה חשמליות מורכבות יותר.
כלי מכונות שונים דורשים לעתים קרובות שליטה חסרת שלבים של מהירות הנסיעה בטווח רחב יותר ממה שניתן לספק על ידי התאמת השטף המגנטי. מנוע DC עם עירור מקביל... במקרים אלה, נעשה שימוש במערכות הנעה חשמליות מורכבות יותר.
באיור. 1 מציג תרשים של כונן חשמלי מתכוונן לפי מערכת גנרטור-מנוע (בקיצור G - D). במערכת זו, מנוע אינדוקציה IM מסובב ברציפות גנרטור DC נרגש עצמאית G ומעורר B, שהוא מחולל DC בעל הספק נמוך מעורר במקביל.
מנוע DC D מניע את גוף העבודה של המכונה. פיתולי העירור של הגנרטור OVG והמנוע ATS מסופקים על ידי המעורר B. על ידי שינוי ההתנגדות של מעגל העירור של הגנרטור G על ידי ריאוסטט 1, המתח המופעל על אבזור המנוע D משתנה, ובכך מהירות המנוע מווסתת. במקרה זה, המנוע פועל בשטף מלא וקבוע מכיוון ש-rheostat 2 מוסר.
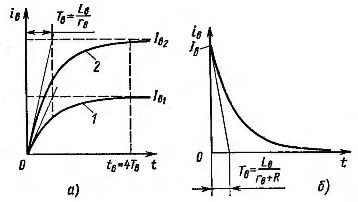
כאשר המתח U משתנה, המהירות משתנה n0 מהירות סרק אידיאלית של המנוע D. מכיוון ששטף המנוע והתנגדות מעגל האבזור שלו אינם משתנים, השיפוע b נשאר קבוע. לכן, המאפיינים המכניים הישניים התואמים לערכים שונים של U ממוקמים זה מתחת לזה ומקבילים זה לזה (איור 2).
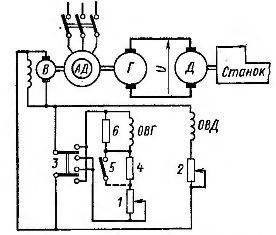
אורז. 1. מחולל מערכת - מנוע DC (dpt)
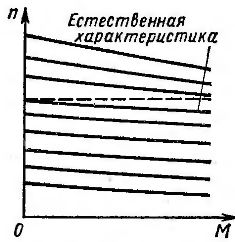
אורז. 2. מאפיינים מכניים של הגנרטור - מערכת מנוע DC
יש להם שיפוע גדול יותר מהמאפיינים של אותו מנוע חשמלי המוזן מהרשת הקבועה, שכן במערכת G - D המתח U בזרם עירור קבוע של הגנרטור יורד עם הגדלת העומס בהתאם לתלות:
שבו למשל. ו-rg - ה, בהתאמה. וכו ' עמ' וההתנגדות הפנימית של הגנרטור.
באנלוגיה עם מנועים אסינכרוניים, אנו מציינים
ערך זה מאפיין את הירידה במהירות המנוע כאשר העומס גדל מאפס לנומינלי. עבור מאפיינים מכניים מקבילים
ערך זה גדל ככל ש-n0 יורד. בערכים גדולים של sn, תנאי החיתוך שצוינו ישתנו באופן משמעותי עם תנודות עומס אקראיות. לכן, טווח ויסות המתח הוא בדרך כלל פחות מ-5:1.
ככל שההספק המדורג של המנועים יורד, ירידת המתח על פני המנועים גדלה והמאפיינים המכניים הופכים תלולים יותר. מסיבה זו, טווח ויסות המתח של מערכת G -D מצטמצם ככל שההספק פוחת (בהספקים של פחות מ-1 קילוואט עד 3:1 או 2:1).
ככל שהשטף המגנטי של הגנרטור פוחת, אפקט הדה-מגנטיזציה של תגובת האבזור שלו משפיעה על המתח שלו במידה רבה יותר. לכן, למאפיינים הקשורים למהירויות מנוע נמוכות יש למעשה שיפוע גדול יותר מהמאפיינים המכניים.
הרחבת טווח הבקרה מושגת על ידי הפחתת השטף המגנטי של המנוע D באמצעות ריאוסטט 2 (ראה איור 1), המיוצר בזרימה מלאה של הגנרטור. שיטה זו של ויסות מהירות מתאימה למאפיינים הממוקמים מעל הטבעי. אחד (ראה איור 2).
טווח הבקרה הכולל, השווה למכפלת טווחי הבקרה של שתי השיטות, מגיע (10 - 15): 1. ויסות המתח הוא בקרת מומנט קבועה (שכן השטף המגנטי של המנוע נשאר ללא שינוי). ויסות על ידי שינוי השטף המגנטי של המנוע D הוא ויסות כוח קבוע.
לפני הפעלת המנוע, D rheostat 2 (ראה איור 1) מוסר לחלוטין ושטף המנוע מגיע לערך הגבוה ביותר. לאחר מכן, הריאוסטט 1 מגביר את עירור הגנרטור G. הדבר גורם לעלייה במתח ולעלייה של מהירות המנוע D. אם הסליל OVG מחובר מיד למתח המלא UB של המעורר B, הזרם בו, כמו בכל מעגל עם השראות והתנגדות אקטיבית, יגדל:
כאשר rv הוא ההתנגדות של סליל העירור, LB הוא השראות שלו (התעלמו מהשפעת הרוויה של המעגל המגנטי).
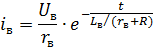
באיור. 3, א (עקומה 1) מציג גרף של התלות של זרם העירור בזמן. זרם העירור גדל בהדרגה; קצב העלייה נקבע לפי היחס

כאשר Tv הוא קבוע הזמן האלקטרומגנטי של פיתול עירור הגנרטור; יש לו מימד של זמן.
אורז. 3. שינוי זרם העירור במערכת G-D
לשינוי במתח הגנרטור בעת ההפעלה יש אותו אופי בערך כמו השינוי בזרם העירור. זה מאפשר למנוע להתניע אוטומטית כאשר ריאוסטט 1 הוסר (ראה איור 1).
העלייה בזרם העירור של הגנרטור מואצת (מאולצת) לרוב על ידי הפעלת ברגע ההתחלתי על פיתול העירור מתח העולה על הנומינלי. ואז תהליך הגברת העירור ימשיך לאורך עקומה 2 (ראה איור 3, א. ). כאשר הזרם בסליל מגיע ל-Iv1, שווה לזרם העירור במצב יציב במתח הנקוב, המתח של סליל העירור מופחת לנומינלי. זמן העלייה של זרם העירור לנומינלי מצטמצם.
כדי לאלץ את העירור של הגנרטור, מתח המעורר V (ראה איור 1) נבחר גבוה פי 2-3 מהמתח הנומינלי של סליל עירור הגנרטור ונגד נוסף 4 מוכנס למעגל. …
מערכת הגנרטור-מנוע מאפשרת בלימה רגנרטיבית. כדי לעצור, יש צורך שהזרם באבזור ישנה את כיוונו. גם המומנט ישנה סימן ובמקום נסיעה הוא יהפוך לבלימה. העצירה מתרחשת כאשר השטף המגנטי של ריאוסטט מנוע 2 עולה או כאשר מתח הגנרטור יורד עם ריאוסטט 1. בשני המקרים, למשל. וכו ' ג E של המנוע הופך גבוה מהמתח U של הגנרטור.במקרה זה, מנוע D פועל במצב גנרטור ומונע לסיבוב על ידי האנרגיה הקינטית של המסות הנעות, והגנרטור G פועל במצב מנוע, ומסובב את מכונת ה-IM במהירות סופר-סינכרונית, אשר בו זמנית עוברת למצב גנרטור ו מספק חשמל לרשת.
ניתן לבצע בלימה רגנרטיבית מבלי להשפיע על ריאוסטטים 1 ו-2. אתה יכול פשוט לפתוח את מעגל עירור הגנרטור (למשל מתג 3). במקרה זה, הזרם במעגל סגור המורכב מפיתול עירור של הגנרטור והנגד 6 יקטן בהדרגה
כאשר R הוא ההתנגדות של נגד 6.
הגרף המתאים למשוואה זו מוצג באיור. 3, ב. ירידה הדרגתית בזרם העירור של הגנרטור במקרה זה שווה לעלייה בהתנגדות של ריאוסטט 1 (ראה איור 1) וגורמת לבלימה רגנרטיבית. במעגל זה, הנגד 6 המחובר במקביל לליפוף העירור של הגנרטור הוא נגד פריקה. הוא מגן על בידוד מתפתל העירור מפני נזק במקרה של הפרעה פתאומית של מעגל העירור.
כאשר מעגל העירור מופרע, השטף המגנטי של המכונה יורד בחדות, גורם ל-e בסיבובים של סליל העירור. וכו ' ג.ההשראות העצמית כל כך גדולה שהיא עלולה לגרום לבידוד המתפתל להתקלקל. נגד הפריקה 6 יוצר מעגל שבו ה. וכו ' ג.ההשראה העצמית של סליל השדה משרה זרם שמאט את ירידת השטף המגנטי.
ירידת המתח על הנגד הפריקה שווה למתח על פני סליל השדה.ככל שערך התנגדות הפריקה נמוך יותר, כך המתח של סליל העירור נמוך יותר כאשר המעגל נשבר. במקביל, עם ירידה בערך ההתנגדות של נגד הפריקה, הזרם הזורם דרכו ברציפות במצב רגיל וההפסדים בו גדלים. יש לקחת בחשבון את שני ההוראות בעת בחירת ערך התנגדות הפריקה.
לאחר כיבוי הפיתול של הגנרטור, נשאר מתח קטן במסופים שלו עקב מגנטיות שיורית. זה יכול לגרום למנוע להסתובב לאט במה שמכונה מהירות זחילה. כדי לחסל תופעה זו, פיתול העירור של הגנרטור, לאחר ניתוק מהמעורר, מחובר למסופים של הגנרטור כך שהמתח מהמגנטיות השיורית גורם לזרם דה-מגנטיזציה בפיתול העירור של הגנרטור.
כדי להפוך את המנוע החשמלי D, כיוון הזרם בסליל העירור של הגנרטור OVG G משתנה באמצעות מתג 3 (או מכשיר דומה אחר). בשל השראות המשמעותית של הסליל, זרם העירור יורד בהדרגה, משנה כיוון ואז עולה בהדרגה.
תהליכי התנעה, עצירה והיפוך של המנוע במערכת הנחשבת הינם חסכוניים ביותר, שכן הם מבוצעים ללא שימוש בריאוסטטים הכלולים באבזור. המנוע מופעל ומאט באמצעות ציוד קל וקומפקטי השולט רק בזרמי שדה קטנים. לכן, מערכת "גנרטור - מנוע DC" זו מומלצת לשימוש לעבודה עם התחלות, בלמים והיפוכים תכופים.
החסרונות העיקריים של מערכת מנוע-גנרטור-DC הם יעילות נמוכה יחסית, עלות גבוהה ומסורבלת עקב הימצאותן של מספר רב של מכונות חשמליות במערכת. מחיר המערכת עולה פי 8 - 10 על מחירו של מנוע כלוב סנאי אסינכרוני עם אותו הספק. יתר על כן, כאלה מערכת הנעה חשמלית דורש הרבה מקום.