השפעת עומס מנוע חשמלי על יעילות והספק
רזרבות כוח באופן כללי או תת עומס של המנוע החשמלי גורם לירידה ביעילות ובכוח. לפעמים יש צורך לדעת את הערכים האמיתיים של מקדמים אלה כדי לקבוע את ערכי ההספק הפעיל והתגובתי הנצרך על ידי המנוע החשמלי מהרשת.
ניתן לקבוע את היעילות של מנועים חשמליים בעומסים הנמוכים מהנומינליים על ידי הנוסחה:
כאשר ηnom היא היעילות הנומינלית של המנוע החשמלי.
כדי לקבוע את β, השתמש בנוסחה:

כאשר Kz הוא היחס בין העומס בפועל לנומינלי (גורם עומס);
α - מקדם בהנחה שווה ל:
• עבור מנועי DC עם עירור סדרתי - מ-0.5 (עבור מהירות נמוכה) עד 1 (עבור מהירות גבוהה);
• עבור מנועים חשמליים עם עירור מקביל - מ-1 (עבור מהירות נמוכה) עד 2 (עבור מהירות גבוהה);
• עבור מנועים חשמליים אסינכרוניים - מ 0.5 עד 1; עבור מנוף ומנועים חשמליים סינכרוניים - עד 2.
הערכים גורם כוח מנוע אינדוקציה תלוי בגורמים רבים, ולמען האמת, שונה עבור כל מנוע חשמלי, אפילו מאותו סוג.
עם זאת, בתנאי תכנון מספיק לדעת רק את הערכים הממוצעים המשוערים של גורם ההספק בהתאם לעומסים הצפויים.
מתרשים עוגה מפושט, מתקבל הקשר הבא:

ייעודים - ראה איור. 1.
כאשר tanφ1, הוא הטנגנס של זווית הפאזה התואמת לעומס בפועל של המנוע החשמלי P1, קילוואט; tanφnom - הטנגנס של זווית הסטת הפאזה התואמת לעומס הנומינלי של המנוע החשמלי PH0M (נקבע על ידי cosφnom המצוין בדרכון המנוע); σ-יחס של מומנט ההתהפכות לנומינלי (נמצא בגבולות הצרים של 1.8-2);

K3 - מקדם עומס.
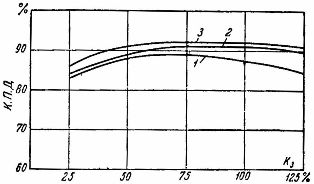
אורז. 1. עקומות יעילות של מנועים חשמליים שונים אסינכרוניים בהתאם לעומס.
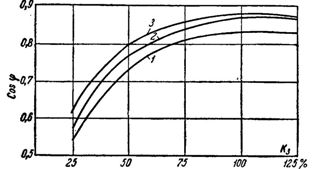
אורז. 2. עקומות של גורם ההספק של מנועים חשמליים אסינכרוניים בהתאם לעומס.
עקומות התלות של η ו- cosφ בעומס עבור הסוגים הנפוצים ביותר של מנועים חשמליים אסינכרוניים ניתנות באיור. 1 ו-2.