מנוע חד פאזי הפיך
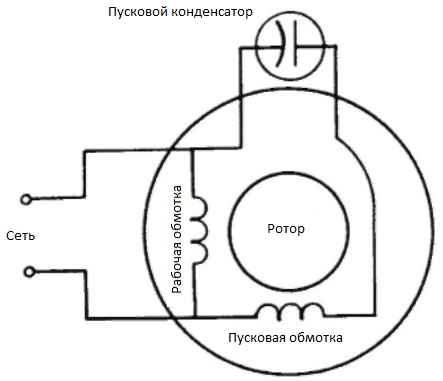
מנוע אינדוקציה נקרא מנוע חד פאזי, שעל הסטטור שלו יש רק פיתול עובד אחד, המסופק ישירות על ידי שלב אחד של הרשת. יש גם פיתול עזר (התנעה) במנוע חד פאזי, המשמש רק בזמן התנעת המנוע כדי לתת לרוטור דחף ראשוני, למעשה, פיתול ההתנעה מופעל כדי להוציא את הרוטור. תנוחת שיווי המשקל, אחרת הוא לא יזוז ללא סיוע ויצטרך לדחוף אותו בדרך אחרת.
כמו בכל מנוע, גם למנוע חד פאזי יש רוטור מסתובב וסטטור שהוא נייח אך רק משמש ליצירת שדה מגנטי משתנה בזמן. פיתולי העבודה וההתחל ממוקמים על הסטטור בזווית ישרה זה לזה, והפיתול העובד תופס פי שניים יותר חריצים מאשר פיתול ההתחלה.
אנו יכולים לומר שבזמן ההפעלה, מנוע כזה פועל כדו-פאזי, ולאחר מכן עובר למצב פעולה חד-פאזי. הרוטור של מנוע אסינכרוני חד פאזי הוא המבנה הנפוץ ביותר - כלוב סנאי (כלוב סנאי) או גלילי (חלול).
מה אם לא היה מתפתל על הסטטור בכלל, או שהוא היה שם אבל לא היה בשימוש. במקרה זה, כאשר המנוע מחובר לרשת, יופיע שדה מגנטי פועם בסליל העבודה, והרוטור ייפול בתנאים של שטף מגנטי משתנה החודר אליו.
אבל אם הרוטור נמצא בתחילה נייח ופתאום נפעיל זרם חילופין על סליל העבודה בלבד, אז הרוטור לא יזוז ממקומו, כי סך המומנט (בכיוון השעון ונגד כיוון השעון) יהיה אפס, למרות ה-emf המושרה ב הרוטור, ואין סיבה לסיבוב כי הכוחות המתעוררים של אמפר מבטלים זה את זה.
זה עניין אחר לגמרי, אם הרוטור נדחף, הוא ימשיך להסתובב באותו כיוון כמו הדחיפה הראשונית, כי עכשיו, לא רק על פי חוק האינדוקציה האלקטרומגנטית, יושרה EMF ברוטור ו, בהתאם, ייווצרו זרמים, שעל פי חוק האמפר יידחו על ידי השדה המגנטי, אך גם (מכיוון שלרוטור כבר יש סיבוב) המומנט המתקבל בכיוון הדחיפה יהיה גדול מהמומנט נגד כיוון הדחיפה. . כתוצאה מכך, אנו מקבלים המשך סיבוב של הרוטור.
על מנת שפיתול ההתחלה ידחוף את הרוטור ברגע ההתחלה, יש להזיז אותו בחלל ביחס לפיתול העבודה, אלא יש להזיז את הזרם בו גם בפאזה ביחס לזרם הפיתול הפועל, ואז פעולה משולבת של שני פיתולי הסטטור האלה תהיה שווה לא רק לשדה מגנטי פועם, אלא כבר לשדה מגנטי מסתובב. וזה בדיוק מה שצריך כדי להאיץ את הרוטור במהלך תחילתו של מנוע חד פאזי.
כדי להזיז את הזרם בפיתול ההתחלה, משתמשים בדרך כלל בקבל בקיבול הנדרש, המחובר בסדרה עם פיתול ההתחלה ויוצר הסטת פאזה של 90 מעלות. זהו הפתרון הסטנדרטי עבור מנועים מפוצלים.
ברגע שהמנוע מחובר לרשת, המפעיל לוחץ על כפתור המתג, המספק אנרגיה למעגל הפעלת הסליל, וברגע שהמהירות מגיעה לערך הנדרש המתאים לדירוג בתדר הנתון של הרשת, הכפתור משוחרר.
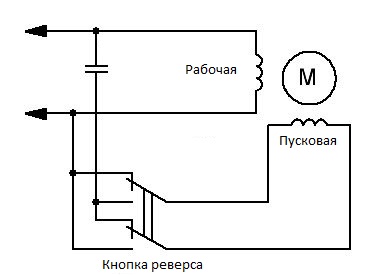
על מנת להשיג היפוך של מנוע התנעת קבלים חד פאזי, מספיק לספק מצב שבו דופק ההתנעה יסופק בכיוון שונה מזה שסופק במקור. זה מושג על ידי שינוי הסדר היחסי של סיבוב הפאזה בפיתולי העבודה וההתחלה.
כדי להבטיח תנאים אלה, יש צורך להחליף את סליל העבודה או ההתחלה, כלומר לשנות את ה"קוטביות" של חיבור המסופים שלו לרשת או לרשת ולקבלים. קל לעשות זאת מכיוון שעל מנוע חד פאזי יש בלוק מסוף שאליו יוצאים כל אחד מהקצוות של פיתולי ההתנעה והריצה. לסליל הריצה התנגדות אקטיבית נמוכה יותר מסליל ההתחלה, כך שקל למצוא אותו עם מודד. הפתרון הטוב ביותר הוא לשים את חוטי סליל המתנע על מתג רגעי דו-קוטבי.