מכשירי בלימה אלקטרומגנטית
במכשירים מסוימים, בלם דיסק אלקטרומגנטי על מנוע חשמלי משמש לעצירת האלמנטים המסתובבים של המכונה. מתקן הבלימה האלקטרומגנטי מותקן ישירות במנוע או על המנוע ומהווה בעצם מנוע עזר או יחידת הנעה העומדת בכל הדרישות הן מבחינת מיקום המכשיר והן מבחינת פעולתו הבטוחה. הוא מוחל ומשוחרר עם קפיץ עם אלקטרומגנט.
פתרון זה מאפשר לא רק להבטיח עצירה בטוחה של המנוע במקרה של תאונה או למקם את האלמנט המנהלי של המכונה במהלך פעולתה, אלא גם פשוט מקצר את זמן פעולת המכונה בזמן עצירתה.
ישנם שני סוגים של בלמי דיסק אלקטרומגנטיים: בלמי דיסק AC ובלמי דיסק DC (בהתאם לצורת הזרם המפעיל את הבלם). עבור גרסת ה-DC של הבלם מסופק למנוע גם מיישר שדרכו מתקבל ה-DC מה-AC שמניע את המנוע עצמו.
עיצוב מכשיר הבלימה כולל: אלקטרומגנט, אבזור ודיסק. האלקטרומגנט עשוי בצורה של סט סלילים הממוקם במארז מיוחד. האבזור משמש כמנגנון בלימה ומהווה משטח נגד חיכוך המקיים אינטראקציה עם דיסק הבלמים.
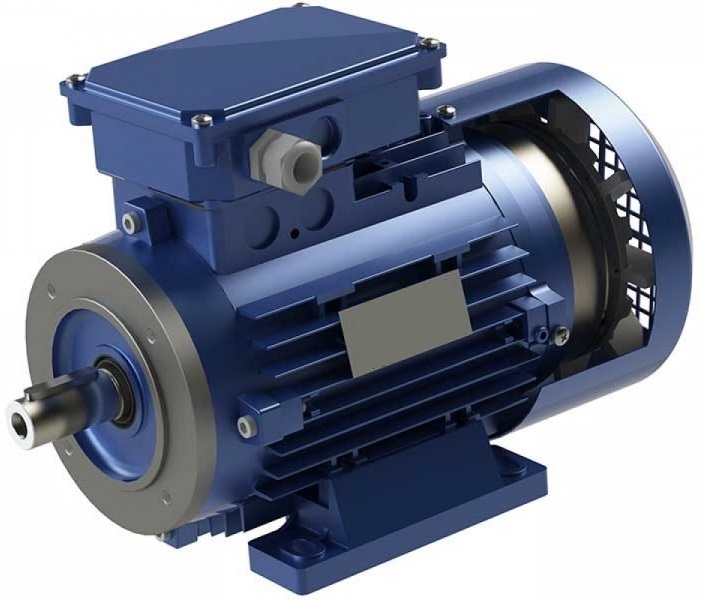
הדיסק עצמו, עם חומר החיכוך המוחל עליו, נע לאורך שיני השרוול על גל המנוע. כאשר מתח מופעל על סלילי הבלמים, האבזור נמשך וציר המנוע יכול להסתובב בחופשיות עם דיסק הבלם.
בלימה מסופקת במצב חופשי כאשר הקפיצים לוחצים על האבזור והוא פועל על דיסק הבלם, ובכך עוצר את הציר.
בלמים מסוג זה נעשה שימוש נרחב במערכות הנעה חשמליות. במקרה של הפסקת חשמל חירום להתקן הבלימה, ייתכן שניתן יהיה לשחרר את הבלם באופן ידני.
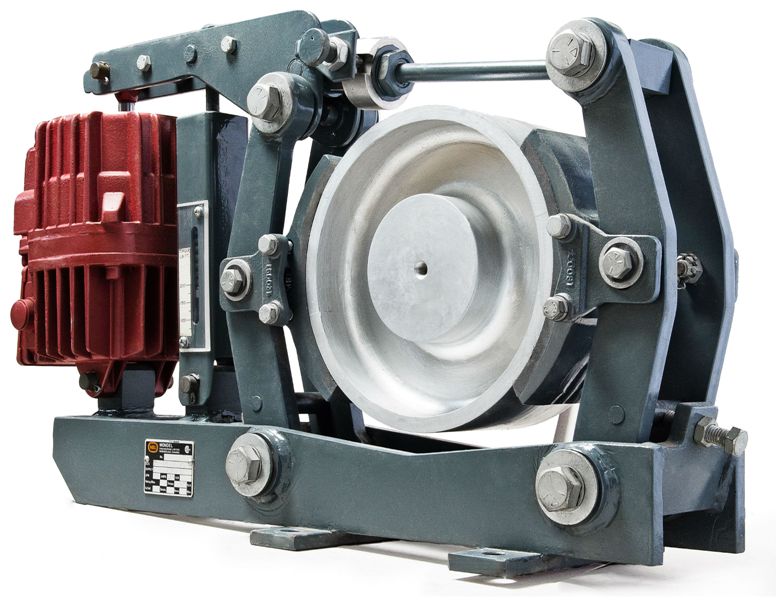
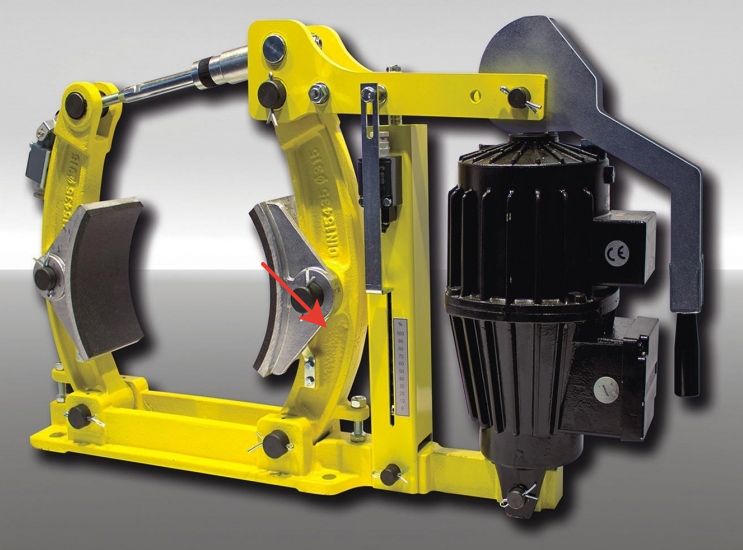
מנופים משתמשים בבלם נעל אלקטרומגנטית (TKG) כדי להחזיק את הציר במצב בלימה כשהמכונה כבויה.
TKP - בלם DC סדרת MP. TKG - בלם טפח אלקטרו הידראולי, סדרת TE. סולנואיד הבלמים TKG כולל הנעה וחלק מכני, אשר בתורו כולל: מעמד, קפיצים, מערכת מנוף ורפידות בלמים.
יחידת הבלמים מותקנת בצורה אנכית עם דיסק הבלם במצב אופקי. החלקים המכניים של מכשירי בלימה מונעי AC או DC זהים עבור רולים באותו קוטר.
בדרך כלל, למכשירים כאלה יש את האות TK ומספר המציין את קוטר רולר הבלם. כאשר הכוח מופעל, המנופים מנטרלים את פעולת הקפיצים ומשחררים את הגלגלת כדי לאפשר סיבוב חופשי.

בלמים אלקטרומגנטיים משמשים ב:
-
חסימת מנופים, מעליות, מכונות הנחת וכו'. במצב כבוי; במנגנונים לעצירת מסועים, מכונות ליפוף ואריגה, שסתומים, ציוד נייד וכו';
-
להפחתת זמן השבתה (זמן השבתה במהלך כיבוי) של מכונות;
-
במערכות עצירת חירום למדרגות נעות, ערבולות וכו' וכו';
-
להפסיק עם מיקום המיקום המדויק בנקודת זמן מסוימת.
בפלטפורמות קידוח נעשה שימוש בבלימת אינדוקציה המבוססת על אינטראקציה בין השדות המגנטיים של משרן, שבתפקידו פועל אלקטרומגנט, ואבזור, שבסליל שלו מושרים זרמים, ששדותיו המגנטיים מאטים "הסיבה שגורמת להם" (ראה חוק לנץ), ובכך ליצור את מומנט הבלימה הדרוש לרוטור.

בואו נסתכל על תופעה זו באיור. כאשר הזרם מופעל בפיתול הסטטור, השדה המגנטי שלו משרה זרם מערבולת ברוטור. זרם המערבולת ברוטור מושפע מהכוח של אמפר, שרגעו במקרה זה מאט.
כפי שאתה יודע, מכונות אסינכרוניות וסינכרוניות עם זרם חילופין, כמו גם מכונות עם זרם ישר, כאשר הציר נע ביחס לסטטור, יכולות לעבוד במצב בלימה. אם הציר נייח (ללא תנועה יחסית), לא יהיה אפקט בלימה.
לפיכך, בלמים מבוססי מנוע משמשים להפסקת הזזת פירים במקום להחזיק אותם במנוחה. יחד עם זאת, ניתן להתאים את עוצמת ההאטה של תנועת המנגנון בצורה חלקה במקרים כאלה, וזה לפעמים נוח.
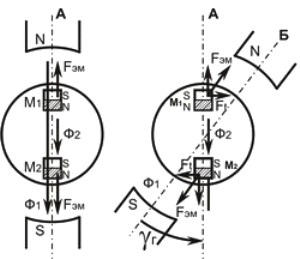
האיור הבא מציג את פעולת בלם ההיסטרזיס.כאשר מסופק זרם לפיתול הסטטור, המומנט פועל על הרוטור, במקרה זה הוא נעצר ומתרחש כאן עקב תופעת ההיסטרזיס מהיפוך המגנטיזציה של רוטור מונוליטי.
הסיבה הפיזית היא שהמגנטיזציה של הרוטור הופכת לכזו שהשטף המגנטי שלו חופף בכיוון לשטף הסטטור. ואם תנסו לסובב את הרוטור ממצב זה (כדי שהסטטור יהיה במצב B ביחס לרוטור), הוא ינסה לחזור למצב A בגלל המרכיבים המשיקים של הכוחות המגנטיים - וכך מתרחשת בלימה במקרה הזה.