שיטות בלימה למנועים חשמליים
 מנועים חשמליים בכונן חשמלי יכולים לעצור במהירות את מנגנון הייצור או להחזיק מהירות מסוימת ברגע חיובי של המכונה הפועלת. במקרה כזה המנוע הופך לגנרטור ופועל באחד ממצבי הבלימה: הפוך, דינמי, משקם (ראה איור 1) בהתאם לשיטת העירור.
מנועים חשמליים בכונן חשמלי יכולים לעצור במהירות את מנגנון הייצור או להחזיק מהירות מסוימת ברגע חיובי של המכונה הפועלת. במקרה כזה המנוע הופך לגנרטור ופועל באחד ממצבי הבלימה: הפוך, דינמי, משקם (ראה איור 1) בהתאם לשיטת העירור.
עצירת הכונן החשמלי על ידי החלפת הפיתולים של השלבים של המנוע החשמלי כדי לקבל את סיבוב השדה בכיוון ההפוך (עצירה הפוכה) משמשים כאשר יש צורך לעצור במהירות את התקן המכונה. במקרה זה, על ידי אינרציה הרוטור מסתובב לכיוון השטף המגנטי, החלקת מנוע הופך ליותר מאחד, והרגע הופך לשלילי.
במנוע DC, לביצוע בלימה הפוכה, משתנה החיבור של קצוות פיתולי האבזור. במקרה זה, זרם האבזור והמומנט משנים כיוון.
בשני המקרים, המתח האפקטיבי הופך גדול, ולכן, על מנת להגביל את הזרם והמומנט, המיתוג מתבצע עם הכללת נגדים בו זמנית במעגל האבזור או הרוטור. אנרגיית הבלימה המגיעה מהרשת מתפזרת בפיתולי האבזור ובנגדים.
בלימה דינמית המאופיינת בכך שהמכונה החשמלית פועלת כגנרטור (דינמו) עם פיזור אנרגיית הבלימה בנגדי הבלימה ובפיתולי המנוע.
לבלימה דינמית, האבזור של מנוע ה-DC מנותק ממקור הכוח ומחובר להתנגדות בעוד שפיתול השדה נשאר מופעל, עבור מנועי אינדוקציה, בלימה דינמית מושגת על ידי הפעלת זרם ישר על פיתול הסטטור של המנוע.
זרם ישר יוצר שדה מגנטי נייח. כאשר הרוטור מסתובב, נגרמת EMF בפיתוליו ומופיע זרם. האינטראקציה של זרם הרוטור עם שדה מגנטי נייח יוצרת מומנט בלימה. ערך מומנט הבלימה תלוי בזרם העירור, המהירות וההתנגדות של מעגל הרוטור (האבזור).
במצב בלימה רגנרטיבית, הרוטור (ארמטורה) של המנוע החשמלי המחובר לרשת מסתובב במהירות גדולה מ- ωo. במקרה זה, הזרם משנה את כיוונו, המכונה החשמלית הופכת לגנרטור הפועל במקביל לרשת החשמל, אנרגיית הבלימה מינוס ההפסדים ניתנת לרשת החשמל.
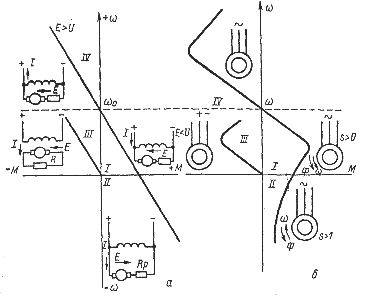
אורז. 1. הפעלה ומאפיינים מכניים של מנועים חשמליים: עירור עצמאי (א) ואסינכרוני (ב) במצבים: I - מנוע, II - אופוזיציה, III - בלימה דינמית, IV - גנרטור עם אספקת אנרגיה לרשת.
בלימה רגנרטיבית משמשת במנופים, לשמירה על מהירות בהורדת העומס, לבדיקה ועבודה בעומס של מנועי מכוניות וטרקטורים, תיבות הילוכים, תיבות הילוכים בעומס, וכן בעת מעבר ממהירות גבוהה יותר למהירות נמוכה יותר. מנועים מרובי מהירויות.