פיר חשמלי ויישומו בהנעה חשמלית של מכונות חיתוך מתכת
 המאמר דן במכשיר, עקרון הפעולה ודוגמאות לשימוש במערכות חשמליות לסיבוב סינכרוני (פיר חשמלי) במכונות ובמתקנים לחיתוך מתכות.
המאמר דן במכשיר, עקרון הפעולה ודוגמאות לשימוש במערכות חשמליות לסיבוב סינכרוני (פיר חשמלי) במכונות ובמתקנים לחיתוך מתכות.
נניח ששני צירים שאינם מחוברים זה לזה באופן מכני אמורים להסתובב באותן מהירויות מבלי להסתובב זה ביחס לזה. כדי להבטיח סיבוב סינכרוני ובפאזה כזה עם מנועים D1 ו-D2, המסובבים את הצירים A ו-II, בהתאמה (איור 1), חברו מכונות עזר אסינכרוניות A1 ו- A2 עם רוטורי פאזה. פיתולי הרוטור של מכונות אלה מחוברים זה לזה.
אם מהירויות הסיבוב של שתי המכונות ומיקומי הרוטורים שלהן זהים, אזי הכוחות האלקטרו-מוטוריים המושרים בפיתולי הרוטורים של המכונות A1 ו-A2 שווים ומכוונים זה לזה (איור 2, א), וכן הזרם אינו זורם במעגל הרוטור.
נניח שכיוון הסיבוב של השדה של מכונות העזר עולה בקנה אחד עם כיוון הסיבוב של הרוטורים שלהן.ככל שהסיבוב של מכונה A2 מאט, הרוטור שלה יפגר אחרי זה של A1, וכתוצאה מכך e. וכו ' ג. Ep2 המושרה בפיתול הרוטור יעבור בשלב להתקדמות (איור 2, ב), ובמעגל הרוטור של מכונות A1 ו-A2 תחת פעולת הסכום הווקטור של e. וכו ' עם E, זרם האיזון Az מופיע.
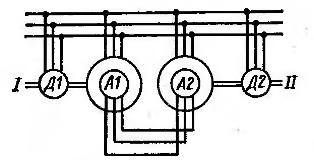
אורז. 1. תכנית תקשורת סינכרונית
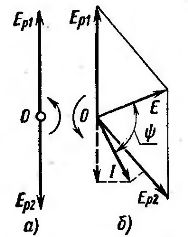
אורז. 2. דיאגרמות וקטוריות של מערכת התקשורת הסינכרונית
הווקטור הנוכחי אני אהיה בפיגור הווקטור e. וכו ' עם E בזווית φ... הקרנת וקטור נוכחית Az על הווקטור e וכו'. v. Ep2 עולה בקנה אחד עם וקטור זה בכיוון. הקרנת הווקטור הנוכחי על הווקטור e. וכו ' עמ' אפ1 מכוון אליו. מכאן נובע שמכונה A2 תפעל במצב מנוע ומכונה A1 במצב גנרטור. במקרה זה, הציר של מכונה A2 יואץ והציר של מכונה A1 יואט. כך יפתחו המכונות מומנטים המשחזרים את הסיבוב הסינכרוני של הצירים. I ו-II והמיקום המתואם הקודם בחלל של הרוטורים של מכונות A1 ו-A2. הרוטורים של מכונות אלו יכולים להסתובב הן בכיוון סיבוב השדה והן בכיוון ההפוך.
מערכת זו נקראת מערכת סיבוב סינכרוני חשמלי... היא נקראת גם פיר חשמלי... מערכת הסיבוב הסינכרוני יכולה להחליף, למשל, ברגי עופרת מחרטות חיתוך ברגים.
מכיוון שמעגלי ההזנה של מכונות חיתוך מתכת, בהשוואה למעגלים של התנועה הראשית, צורכים בדרך כלל הספק נמוך, ניתן להשתמש בסכימה פשוטה יותר של סיבוב סינכרוני כדי לסנכרן את התנועה הראשית עם ההזנה (איור 3).במקרה זה, חוסר התאמה קבוע בין מיקומי הרוטורים של מכונות A1 ו-A2 הוא בלתי נמנע, שבלעדיו לא יהיה זרם במעגל הרוטור של מכונה A2 והוא לא יוכל להתגבר על רגע כוחות ההתנגדות של מעגל האספקה. מכיוון שמכונת ה-A2 מקבלת כוח מהסטטור ומהרוטור, מערכת פירים חשמליים זו דורשת חיבור שישה חוטים למנוע, המותקן במקרים רבים על בלוק מכונה נע, המוצג בדרך כלל באיור הקו המקווקו.
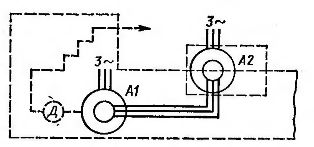
אורז. 3. מערכות תקשורת סינכרוניות של מחרטת בורג כבדה
בתוך הסטייה הזוויתית, שאינה עולה על 90 מעלות, מומנט הסנכרון החשמלי גדל. על מנת להבטיח מומנט סינכרוני משמעותי, מכונות תקשורת סינכרוניות בכל תדרי הסיבוב הזוויתיים האפשריים חייבות לפעול עם החלקות גדולות (לא פחות מ-0.3 - 0.5). לכן, מכונות אלה חייבות להיות גדולות מספיק כדי למנוע חימום בלתי מקובל.
כוחן של המכונות מוגבר עוד יותר בניסיון לבטל את ההשפעה של תנודות עומס וכוחות חיכוך. נעשה שימוש גם בהילוכים מכניים המפחיתים את תדירות הסיבוב של פירי המכונה ובהתאם את גודל שגיאת הזווית המופחתת לציר המכונה.לפני תחילת פעולת הציר החשמלי מחוברות המכונות האסינכרוניות A1 ו-A2 ל. ספק כוח חד פאזי. במקרה זה, הרוטור של מכונה A2 תופס את המיקום ההתחלתי שלו, המתאים למיקום הרוטור של מכונה A1.
מערכות סיבוב סינכרוני בשימוש רציונלי עבור מכונות חיתוך מתכות כבדות, שכן ייצור של ברגים עופרת ארוכים קשור בקשיים משמעותיים.בנוסף, ככל שאורך הברגים או הצירים גדל, עקב הפיתול שלהם, הדיוק של תיאום הסידור ההדדי של חלקי המכונה פוחת. במערכת פירים חשמליים, המרחק בין הפירים אינו יכול להשפיע על דיוק הפעולה.
בעת שימוש בפיר חשמלי, החיבורים המכניים של הקליפרים לציר מתבטלים והתרשים הקינמטי מפושט מאוד. חיסרון משמעותי של מערכות פיר חשמלי במכונות חיתוך מתכות כבדות הוא האפשרות של נזק לחלק יקר בזמן הפסקת חשמל, שכן חוסר יישור מתרחש באופן מיידי. במקרים מסוימים, בתאונה כזו, ניתן למנוע נזק לחומר העבודה על ידי נסיגה אוטומטית מהירה של הכלי.
תכנית עם שני מנועים אסינכרוניים זהים עם רוטורי פאזה מעניינת עבור הנדסת מכונות (איור 4). מכיוון שהמעגל של שני הרוטורים סגור ל-Rheostat R, כאשר המנועים מחוברים לרשת AC, שני הרוטורים מתחילים להסתובב.
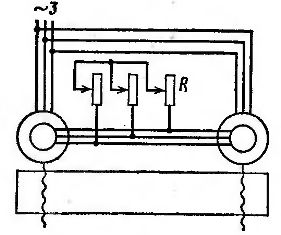
אורז. 4. תוכנית תקשורת סינכרונית עם ריאוסטט סיבובי
בנוסף לזרמים הזורמים בפיתולי הרוטור והריאוסטט, זורם זרם משווה במעגל הרוטור של שתי המכונות. נוכחותו של זרם זה גורמת להופעת מומנט סנכרון, וכתוצאה מכך המכונות מסתובבות באופן סינכרוני. מערכת זו יכולה לשמש להגבהה והורדה של הזרועות הצולבות של משטחים גדולים, נתבים וקרוסלות.
הודות למערכת הפירים החשמליים נפתרת בעיית התנועה המתואמת של מסועים שהם חלק ממתחם ייצור.היישום המעשי ביותר במקרה זה מתקבל מהגרסה של סיבוב סינכרוני של מנועים עם ממיר תדר משותף.
בנוסף למערכות הפיר החשמליות לבניית מכונות הנחשבות, פותחו והשתמשו במערכות מכונות AC אחרות, לרבות מערכות חד פאזיות ומערכות עם מנועים סינכרוניים בבנייה מיוחדת.