צורות מבניות של מנועים אסינכרוניים
 צורות מבניות חיצוניות מנועים אסינכרוניים נקבעים לפי אופן הרכבת המנוע וצורת ההגנה שלו מהשפעת הסביבה. ביצועים מוטוריים רגילים של הרגל נפוצים (איור 1, א). במקרה זה, ציר המנוע חייב להיות אופקי. מנועים עם אוגנים (איור 1, ב) נמצאים בשימוש נרחב עבור התקנות אופקי ואנכי.
צורות מבניות חיצוניות מנועים אסינכרוניים נקבעים לפי אופן הרכבת המנוע וצורת ההגנה שלו מהשפעת הסביבה. ביצועים מוטוריים רגילים של הרגל נפוצים (איור 1, א). במקרה זה, ציר המנוע חייב להיות אופקי. מנועים עם אוגנים (איור 1, ב) נמצאים בשימוש נרחב עבור התקנות אופקי ואנכי.
הם גם מייצרים מנועי אינדוקציה מוטבעים שאין להם מסגרת, מגני קצה, פיר. אלמנטים של מנוע כזה מוטבעים בחלקי גוף המכונה, וציר המנוע הוא אחד מפירי המכונה (לעיתים קרובות הציר), והמיטה היא גוף מכלול המכונה, למשל, ראש שחיקה (איור .2).
מנועים בעיצוב מיוחד מופצים בחו"ל, כולל מנועים בעלי ממדים רדיאליים קטנים ואורך ניכר, ומנועי דיסק, במיוחד עם סטטור בצורת גליל ורוטור חיצוני בצורת טבעת. מנועים משמשים גם, כאשר הם מופעלים, הרוטור, בעל צורה של חרוט, נע בכיוון צירי, מפתח כוח דחף משמעותי.
כוח זה משמש לשחרור הבלם המכני הפועל על ציר המנוע לאחר ניתוק המנוע מהרשת. בנוסף, נעשה שימוש בעיצובי מנוע רבים עם תיבות הילוכים מחוברות, תיבות הילוכים ווריאטורים מכניים המספקים ויסות חלק.
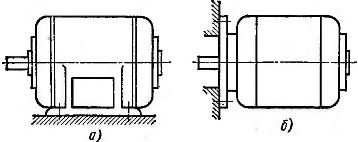
אורז. 1. תכנון מנועים אסינכרוניים
החיסרון בשימוש במנועים בעלי צורות עיצוב מיוחדות הוא הקושי בהחלפתם במקרה של תאונה. אין להחליף מנוע חשמלי פגום, אלא לתקן, ולעשות את המכונה במצב סרק במהלך התיקון.
מנועים עם צורות שונות של הגנה על הסביבה משמשים להנעת המכונות.
למנועים ממוגנים יש גרילים המכסים את פתחי האוורור במגני הקצה. זה מונע חפצים זרים להיכנס למנוע וגם מונע מהעובד לגעת בחלקים מסתובבים וחיים. כדי למנוע נפילת טיפות נוזל מלמעלה, המנועים מצוידים בפתחי אוורור כלפי מטה או אנכיים.
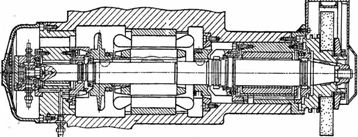
אורז. 2. מנוע שחיקה מובנה
עם זאת, כאשר מנוע חשמלי כזה עובד בבית מלאכה, המאוורר שלו, יחד עם האוויר, שואב אבק, מרסס נוזל קירור או שמן, כמו גם חלקיקים קטנים של פלדה או ברזל יצוק, הנצמדים לבידוד של המתפתל ורוטט. בהשפעת שדה מגנטי לסירוגין, נשחק במהירות את הבידוד.
למנועים סגורים, שלמסכי הקצה שלהם אין חורי אוורור, יש הגנה אמינה יותר מפני השפעות סביבתיות. למנועים כאלה, בעלי מידות זהות לאלו המוגנים, בגלל קירור גרוע יותר, יש פחות כוח.עם אותם כוחות ומהירויות, המנוע החשמלי הסגור כבד פי 1.5-2 מהמוגן ובהתאם לכך מחירו גבוה יותר.
הרצון להפחית את הגודל והעלות של מנועים סגורים הוביל ליצירת מנועים חשמליים מפוצצים סגורים. למנוע חשמלי כזה יש מאוורר חיצוני המותקן על קצה ציר המנוע מול קצה ההינע ומכוסה בפקק. מאוורר זה נושף סביב בית המנוע.
מנועי המאווררים קלים יותר וזולים משמעותית מאלה הסגורים. מנועים מפוצצים משמשים לרוב להנעת מכונות חיתוך מתכת. מנועים עם צורות אחרות של הגנה על הסביבה משמשים לעתים רחוקות יחסית להנעת מכונות חיתוך מתכת. בפרט, מנועים חשמליים סגורים משמשים לעתים להנעת מכונות שחיקה.
מנועים חשמליים מיועדים למתחים סטנדרטיים של 127, 220 ו-380 וולט. ניתן לחבר אותו מנוע לרשתות במתחים שונים, למשל, לרשתות במתחים של 127 ו-220 וולט, 220 ו-380 וולט. עם שני מתחים, ה- סלילה סטטור של המנוע החשמלי מחובר במשולש, עבור אחד גדול יותר - בכוכב. הזרם בפיתולי המנוע החשמלי והמתח בהם יהיו זהים בשני המקרים עם הכללה זו. בנוסף, הם מייצרים מנועים חשמליים 500 V, הסטאורים שלהם מחוברים באופן קבוע בכוכב.
מנועי כלוב סנאי אסינכרוני המשמשים בתעשיות רבות מיוצרים בהספק נקוב של 0.6-100 קילוואט לכל מהירויות סינכרוניות 600, 750, 1000, 1500 ו-3000 סל"ד.
החתך של החוטים של סלילה של המנוע החשמלי תלוי בגודל הזרם הזורם דרכו. עם זרם גדול יותר, נפח המנוע יהיה גדול יותר.החתך של המעגל המגנטי הוא פרופורציונלי לגודל השטף המגנטי. בדרך זו, מידות המנוע החשמלי נקבעות על פי הערכים המחושבים של זרם ושטף מגנטי או המומנט הנקוב של המנוע החשמלי. כוח מנוע מדורג

כאשר P.n - הספק נומינלי, kW, Mn- מומנט נומינלי, N • m, nn- מהירות נומינלית, סל"ד.
ההספק המדורג עבור אותו גודל מנוע גדל ככל שהמהירות הנקובת שלו עולה. לכן, מנועים חשמליים במהירות נמוכה גדולים יותר ממנועים מהירים בעלי אותו הספק.
בעת שחיקה של חורים קטנים, נדרשות מהירויות ציר שחיקה גבוהות מאוד כדי להשיג מהירויות חיתוך נאותות. לכן, כאשר טוחנים עם גלגל בקוטר של 3 מ"מ במהירות של 30 מ' לשנייה בלבד, מהירות הציר צריכה להיות שווה ל-200,000 סיבובים לדקה. במהירויות ציר גבוהות, ניתן להפחית בחדות את כוח ההידוק. במקביל, השחזה של הגלגלים וכיפוף המדרלים מופחתים, וגימור פני השטח ודיוק העיבוד מוגברים.
בקשר עם האמור לעיל, התעשייה משתמשת בדגמים רבים של מה שנקרא. צירים חשמליים במהירויות סיבוב של 12,000-144,000 סל"ד ומעלה. הציר האלקטרו (איור 3, א) הוא ציר שחיקה על מיסבים מתגלגלים עם מנוע מובנה בתדר גבוה של כלוב סנאי. רוטור המנוע ממוקם בין שני מיסבים בקצה הציר מול גלגל השחזה.
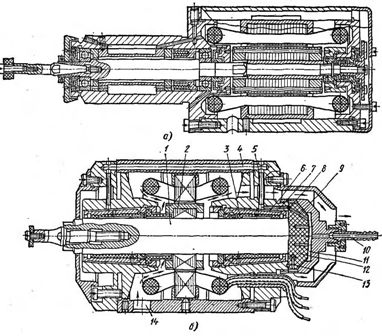
אורז. 3. אלקטרוסינדלים
סטטור הציר החשמלי מורכב מפלדה חשמלית. מניחים עליו סליל דו-קוטבי.רוטור המנוע במהירויות של עד 30,000-50,000 סל"ד מחויג גם הוא ממתכת ומסופק עם פיתול קצר חשמלי קונבנציונלי. הם נוטים להפחית את קוטר הרוטור ככל האפשר.
לבחירת סוג המיסב יש חשיבות מיוחדת לפעולת האלקטרוספינדלים. נפוץ בשימוש במיסבים כדוריים מדויקים, הפועלים עם עומס מראש שנוצר באמצעות קפיצים מכוילים. מיסבים כאלה משמשים למהירויות סיבוב שאינן עולות על 100,000 סיבובים לדקה.
מיסבים אווירוסטטיים נמצאים בשימוש נרחב בתעשייה (איור 3, ב). הציר 1 של המנוע החשמלי בתדר גבוה מסתובב במיסבים משומנים באוויר 3. העומס הצירי נספג על ידי כרית האוויר שבין קצה הציר לבין מסב התמיכה 12, אשר כנגדו נלחץ הציר בלחץ האוויר המסופק לפנים הבית דרך החור 14 לקירור המנוע. אוויר דחוס עובר דרך המסנן ונכנס דרך החיבור 10 בתא 11. מכאן, דרך תעלה 9 והחריץ העגול 8, האוויר עובר לתעלה 7 ולתא 6. משם האוויר נכנס למיסב פער. האוויר מסופק למיסב השמאלי דרך צינורות 5 ותעלות 4 בבית המנוע.
אוויר הפליטה נפלט דרך התעלות 13. כרית האוויר במרווח מיסב התמיכה נוצרת מהאוויר העובר מהתא 11 דרך המיסב העשוי מגרפיט פחמן נקבובי. לכל מיסב יש פליז מחודד. לתוכו נלחצת תוחם פחמן גרפיט, שנקבוביותיו מלאות ברונזה. לפני הפעלת הציר האלקטרוני, מסופק אוויר ונוצרות כריות אוויר בין הציר לתותבים. זה מבטל חיכוך ובלאי על המסבים במהלך ההפעלה.לאחר מכן, המנוע מופעל, מהירות הרוטור 2 מגיעה למהירות הנומינלית תוך 5-10 שניות. כאשר המנוע כבוי, רוטור 2 משתחרר למשך 3-4 דקות. כדי לצמצם את הזמן הזה, נעשה שימוש בבלם חשמלי.
השימוש בכריות אוויר מקטין באופן דרסטי את הפסדי החיכוך בציר החשמלי, צריכת האוויר היא 6-25 מ"ק לשעה.
כמו כן נעשה שימוש באלקטרוסינדלים על מיסבים עם שימון נוזלי. פעולתם דורשת זרימת שמן רציפה בלחץ גבוה, אחרת החימום של המסבים הופך לבלתי מקובל.
ייצור מנועים חשמליים בתדר גבוה דורש ייצור מדויק של חלקים בודדים, איזון דינמי של הרוטור, הרכבה מדויקת והבטחת אחידות קפדנית של הפער בין הסטטור לרוטור. תדר הזרם המספק את המנוע החשמלי בתדר גבוה נבחר בהתאם למהירות הנדרשת של המנוע החשמלי:

כאשר nאם תדר הסיבוב הסינכרוני של המנוע החשמלי, סל"ד, f הוא תדר הזרם, Hz, p הוא מספר הקטבים, שכן p = 1, אז

במהירויות סיבוב סינכרוניות של הצירים החשמליים של 12,000 ו-120,000 סל"ד, התדר הנוכחי צריך להיות שווה ל-200 ו-2000 הרץ, בהתאמה.
גנרטורים מיוחדים משמשים להנעת מנועים בתדר גבוה. באיור. 4 מציג מחולל אינדוקציה סינכרוני תלת פאזי. לסטטור הגנרטור יש חריצים רחבים וצרים. סליל השדה, הממוקם בחריצים הרחבים של הסטטור, מסופק בזרם ישר. השדה המגנטי של המוליכים של סליל זה נסגר דרך שיני הסטטור ובליטות הרוטור כפי שמוצג באיור. 4 עם קו מקווקו.
כאשר הרוטור מסתובב, השדה המגנטי הנע לאורך בליטות הרוטור חוצה את סיבובי פיתול זרם החילופין הממוקם בחריצים הצרים של הסטטור ומשרה e לסירוגין. וכו ' ג. התדירות של ה. וכו ' v. תלוי במהירות ובמספר אוזני הרוטור. הכוחות האלקטרו-מוטוריים המושרים מאותו שטף בפיתולי השדה הפתולים מבטלים זה את זה עקב הפעלת הסלילים הממשמשת ובאה. סלילי השדה מופעלים על ידי מיישר המחובר לרשת החשמל. לסטטור ולרוטור יש ליבות מגנטיות עשויות פלדה חשמלית.
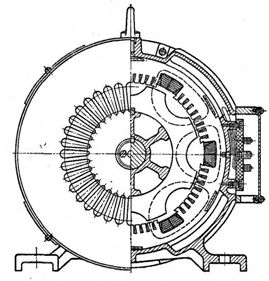
אורז. 4. מחולל אינדוקציה בתדר גבוה
גנרטורים עם העיצוב המתואר מיוצרים עבור הספק נומינלי מ-1 עד 3 קילוואט ותדרים מ-300 עד 2400 הרץ. הגנרטורים מונעים על ידי מנועים אסינכרוניים במהירות סינכרונית של 3000 סל"ד.
גנרטורים אינדוקציה בעלי תדירות מוגברת מתחילים להיות מוחלפים בממירי מוליכים למחצה (תיריסטורים). במקרה זה, הם בדרך כלל מספקים את היכולת לשנות את תדירות הזרם ולכן את היכולת להתאים את מהירות הסיבוב של המנוע החשמלי. אם במהלך ויסות כזה המתח נשמר קבוע, אז מבוצע ויסות כוח קבוע. אם היחס בין המתח לתדר של הזרם (ולכן השטף המגנטי של המנוע) נשמר קבוע, אזי הוויסות מתבצע עם קבוע בכל המהירויות במשך זמן רב מומנט מותר.
היתרונות של כוננים עם ממיר תדר תיריסטור ומנוע כלוב סנאי אסינכרוני הם יעילות גבוהה וקלות שימוש. החיסרון הוא עדיין המחיר הגבוה.בהנדסת מכונות, הכי מומלץ להשתמש בכונן כזה עבור מנועים בתדר גבוה. כונני ניסוי מסוג זה נוצרו בארצנו.
מנועים אסינכרוניים דו-פאזיים בעלי הספק נמוך משמשים לעתים קרובות בכוננים מנהלים של כלי מכונות. לסטטור של מנוע כזה יש שתי פיתולים: פיתול שדה 1 ופיתול בקרה 2 (איור 5, א). לרוטור 4 בכלוב סנאי יש התנגדות פעילה גדולה. ציר הסלילים מאונך זה לזה.
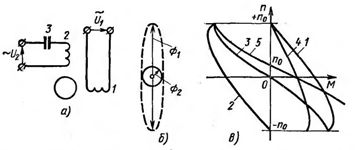
אורז. 5. תכנית של מנוע אינדוקציה דו-פאזי ומאפייניו
מתחים Ul ו-U2 מופעלים על הפיתולים. כאשר הקבל 3 מחובר למעגל של סליל 2, הזרם בו עולה על הזרם בסליל 1. במקרה זה נוצר שדה מגנטי אליפטי מסתובב והרוטור 4 של הסנאי מתחיל להסתובב. אם תפחית את המתח U2, גם הזרם בסליל 2 יקטן. זה יוביל לשינוי בצורת האליפסה של השדה המגנטי המסתובב, שהולכת ומתארכת (איור 5, ב).
מנוע שדה אליפטי יכול להיחשב כשני מנועים על פיר אחד, האחד פועל עם שדה פועם F1 והשני עם שדה עגול F2. ניתן לחשוב על מנוע השדה הפועם F1 כשני מנועי אינדוקציה של שדה עגול זהים המחוברים לסיבוב בכיוונים מנוגדים.
באיור. 5, c מציג את המאפיינים המכניים 1 ו-2 של מנוע אינדוקציה עם שדה סיבוב מעגלי והתנגדות אקטיבית משמעותית של הרוטור בעת סיבוב בכיוונים שונים. ניתן לבנות את המאפיין המכאני 3 של מנוע חד פאזי על ידי הפחתת המומנטים M של המאפיינים 1 ו-2 עבור כל ערך של n.בכל ערך של n, מומנט של מנוע חד פאזי עם התנגדות רוטור גבוהה נעצר. המאפיין המכאני של מנוע השדה המעגלי מיוצג על ידי עקומה 4.
ניתן לבנות את המאפיין המכאני 5 של מנוע דו-פאזי על ידי הפחתת המומנטים M של המאפיינים 3 ו-4 בכל ערך של n. הערך של n0 הוא מהירות הסיבוב של מנוע אינדוקציה דו-פאזי במהירות סרק אידיאלית. על ידי התאמת זרם האספקה של סליל 2 (איור 5, א), ניתן לשנות את השיפוע של מאפיין 4 (איור 5, ג), ומכאן את הערך של n0. בדרך זו מתבצעת בקרת המהירות של מנוע אינדוקציה דו-פאזי.
כאשר פועלים עם ערכי החלקה גבוהים, הפסדים ברוטור הופכים משמעותיים למדי. מסיבה זו, הרגולציה הנחשבת משמשת רק עבור כונני עזר בהספק נמוך. כדי להפחית את זמן ההאצה וההאטה, נעשה שימוש במנועי אינדוקציה דו-פאזיים עם רוטור חלול. במנוע כזה, הרוטור הוא צילינדר חלול מאלומיניום בעל קירות דקים.