מנועי קבל חד פאזי רב מהירויות
מנועי אינדוקציה חד פאזיים זמינים לפעולה ללא בקרת מהירות. במקרים בהם יש צורך לשנות את המהירות, משתמשים לרוב במנועים עם שינוי במספר זוגות המוט.
באופן כללי, ניתן ליישם 3 שיטות שונות לשינוי המהירות של מנוע חד פאזי. האחת היא שהסטטור מכיל 2 סטים שלמים של פיתולים, כל אחד למספר שונה של קטבים. לאחר מכן, לפי משוואה 2, מתקבלות מהירויות שונות באותה תדר רשת. 2 השיטות האחרות הן שינוי המתח במסופי המנוע או שינוי מספר הסיבובים בפיתול הראשי על ידי הסתעפות ממנו.
השיטה המבוססת על שימוש ב-2 סטים של פיתולים משמשת בעיקר עבור מנועים מפוצלים ומנועי התנעת קבלים. שיטות המבוססות על וריאציה במתח או שימוש בפיתולי הברגה משמשות בעיקר עבור מנועי קבלים עם קיבול מיתוג קבוע.

נכון לעכשיו, הם נמצאים בשימוש נרחב להנעת מנגנונים שונים מנועי קבלים אסינכרוניים מרובי מהירויות (מנועים חשמליים עם קיבולת אחת קבועה)... סוג זה של מנועים חשמליים אינו דורש אלמנטים נוספים הדרושים לחיבור לרשת, וגם מאפשר לך פשוט לשנות את כיוון הסיבוב של הציר. כדי לעשות זאת, זה מספיק כדי לשנות את הקצוות של הפיתולים הראשיים או העזר במעגל.
V מנועי קבלים המעגלים הבסיסיים להפעלת הסלילים המוצגים באיור. 1. הנפוצה ביותר היא מה שנקרא חיבור מקביל של הפיתולים (איור 1, א). כפי שניתן לראות מהאיור, פיתולי הסטטור מחוברים במקביל לאספקת החשמל. קבל העברת הפאזה C מחובר בסדרה עם פיתול העזר.
ערך הקיבול של הקבל נבחר מתוך התנאים למתן הדרוש מאפיינים של מנועים חשמליים... באופן עקרוני, במנועי קבלים, הקיבול נבחר כך שהסטת הפאזה של הזרמים בפיתולים הראשיים והעזרים במצב הנומינלי קרוב ל-90 מעלות. במקרה זה, למנוע יש את היעילות האנרגטית הטובה ביותר בנקודת ההפעלה, אך ההתנעות מתדרדרות.
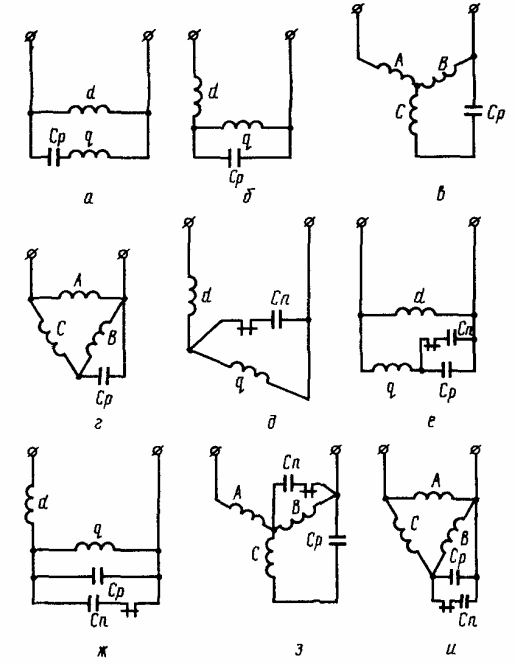
אורז. 1. ערכות לחיבור פיתולים של מנועים אסינכרוניים
השינוי בתדירות הסיבוב של מנועי קבלים מתבצע לרוב על ידי שינוי מספר זוגות המוטות... למטרה זו, או שתי קבוצות של פיתולים עם מספר שונה של קטבים, או קבוצה אחת, עם שינוי במספר הקטבים, מונחות על הסטטור.
במקרים שבהם לא נדרש טווח משמעותי של בקרת מהירות, נעשה שימוש בשיטה הפשוטה ביותר - שינוי במספר הסיבובים של סליל העבודה... במקרה זה, כאשר מתח הרשת נשאר ללא שינוי, גודל השטף המגנטי של המנוע החשמלי, ולכן, המומנט האלקטרומגנטי ומהירות הרוטור משתנים.
מנועים דו-הילוכים עם פיתולי הברגה
נאמר בעבר כי ניתן לשנות את המהירות של מנוע חד פאזי או ע"י שינוי המתח במסופים שלו או ע"י שינוי מספר הסיבובים של הפיתול המשני שלו. השיטה הראשונה מצריכה שימוש בשנאי אוטומטי ומשמשת בעיקר עבור מנועי קבלים עם מעבה קבוע, עם מאוורר פיר.
עם שנאי אוטומטי אתה יכול לקבל יותר מ-2 מהירויות. השינוי במספר הסיבובים של הפיתול הראשי מתקבל על ידי הסתעפות ממנו. אז לסטטור יש 3 פיתולים: ראשוני, ביניים ועזר. ל-2 הסלילים הראשונים יש את אותו ציר מגנטי, כלומר. פיתול הביניים מתפתל באותם חריצים כמו הפיתול הראשי (מעליו).
היישום המעשי של שיטה זו הוא כדלקמן. בחריצי הסטטור, בנוסף לחוטי פיתולי ההפעלה (RO) והקבלים (KO), מונחים החוטים של הפיתול הנוסף (DO). כתוצאה מהשילוב של מעגלי מיתוג מפותלים שונים (איור 2), ניתן יהיה להשיג מאפיינים מכניים שונים של המנוע החשמלי עם מתח אספקה קבוע.
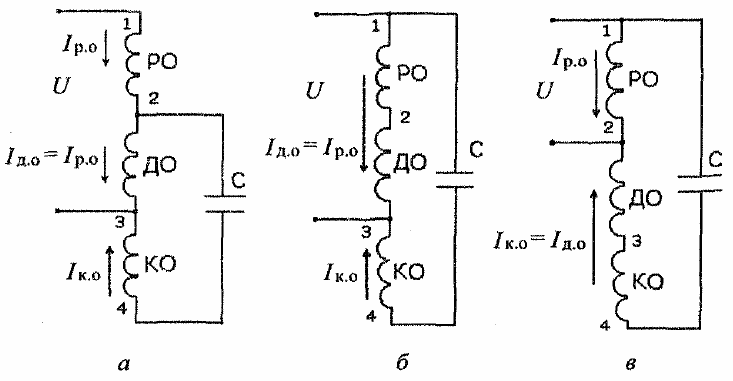
אורז. 2. דיאגרמות חיבור של פיתולי הסטטור של מנוע קבלים מרובי מהירויות במינימום (a), מוגברת (b) ומקסימום מהירות (c)
בתהליך התאמת מהירות הסיבוב במנועים חשמליים עם קבלים מרובי מהירויות, מתרחשים תהליכים חולפים הקשורים לשינוי במעגלי המיתוג של פיתולי הסטטור.תהליכים אלו מתרחשים, ככלל, בשדות מגנטיים מתמשכים ויכולים לגרום לזרמי פריצה ולמתחי יתר משמעותיים בפיתולי המנוע ובקבלים מעבירי הפאזה.
שני מהירויות מנועים עם 2 סטים של סלילים
הצבת 2 סטים של סלילים כלומר. 2 סלילים ראשיים ו-2 סלילי עזר, דורש הגדלת גודל משמעותית. כדי להקטין ממדים אלה, נעשה שימוש לעתים קרובות בחיבור מתפתל עזר או במהירות נמוכה, כאשר מספר הפיתולים קטן ממספר הקטבים.
באיור. 3 מציג את דיאגרמת החיבור של הפיתולים עבור 4 ו-6 קטבים (כ-1435 ו-950 סל"ד ב-50 הרץ). סלילה חיצונית - פיתול ראשי בעל 4 קוטבים. הבא הוא הפיתול הראשי בן 6 הקוטבים. השלישי הוא פיתול עזר בעל 4 קוטבים עם 2 קבוצות פיתולים בלבד. הסליל הפנימי הוא סליל עזר בעל 6 קוטבים עם 2 קבוצות סלילים בלבד.
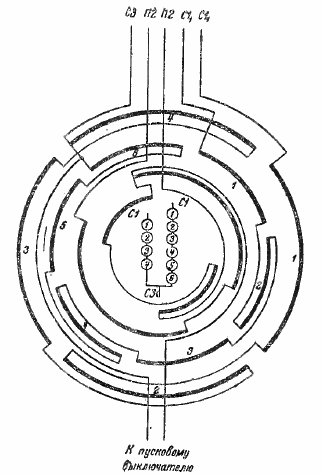
אורז. 3. דיאגרמת חיווט של מנוע בעל 2 מהירויות (4 ו-6 קוטבים).
באיור. 3 ולשתי פיתולי העזר יש מספר מופחת של קבוצות פיתולים. אתה יכול גם לעשות את הסליל הראשי מאותו סוג.
בואו נסתכל על 2 דוגמאות. פיתול הסטטור ל-4 ו-8 קטבים יכול להיות בעל פיתול ראשי רגיל של 4 קוטבים ועוד 3 פיתולים עם מספר מופחת של קבוצות פיתולים, כלומר. פיתול ראשי 8 קוטבי עם 4 קבוצות פיתול, פיתול עזר 4 קוטבי עם 2 קבוצות פיתול ו-8 - פיתול עזר עם 4 קבוצות פיתולים.
פיתול הסטטור ל-6 ו-8 קטבים יכול להיות בעל פיתול ראשי רגיל של 6 קוטבים, שני פיתולים 8 קטבים עם מספר מופחת של קבוצות, כלומר. פיתול ראשי 8 קוטבי ופיתול עזר 8 קוטבי עם קבוצות 4 קטבים כל אחת, ופיתול עזר 6 קוטבי עם 2 קבוצות פיתולים. ניתן לעצב את פיתול העזר בעל 6 הקוטבים גם כפיתול רגיל, כלומר.עם 6 קבוצות של סלילים.
באיור. 4 מציג תרשים של מנוע דו-שלבי מפוצל פאזי עם 2 פיתולים וכן מציג את החיבור לרשת החשמל. החיבורים נעשים בצורה כזו שנדרש רק מתג התחלה אחד. מתג הפעלה זה אמור להיפתח ב-75 עד 80% מהמהירות הסינכרונית של סליל המהירות הנמוכה.
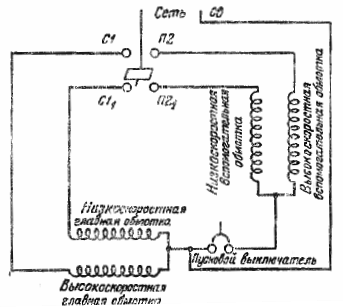
אורז. 4. תרשים של מנוע מפוצל פאזי דו-הילוכים
אם התוכנית המוצגת באיור. 4, משמש למנוע התנעה של קבלים, ואז נעשה שימוש בקבל אחד המחובר בסדרה עם מתג ההתנעה או ב-2 קבלים, שאחד מהם מחובר בסדרה עם מסוף P2 והשני עם מסוף P21.
אם תמיד ניתן להפעיל את המנוע עם חיבור התואם לאותה מהירות, אז ניתן להשמיט את אחת מפיתולי העזר. במקרה זה, ההפעלה אוטומטית חלקית או מלאה.
מנועים חשמליים חד פאזיים אסינכרוניים מרובי מהירויות DASM
כדי להשיג מהירויות גבוהות במכשירי חשמל ביתיים, נדרשים לעתים קרובות מנועים חשמליים עם יחס מהירות רוטור גבוה. מנועים אסינכרוניים של קבלים חד פאזיים עם 2/12 מספרי קוטב משמשים למטרות אלה; 2/14; 2/16; 2/18; 2/24 ואפילו יותר.
עם זאת, ייצור מנועים עם יחס קוטב גדול הוא קשה מבחינה טכנולוגית, ולכן משתמשים בסוגים שונים של ממירי מהירות מכניים, כמו גם ממירי תדר מוליכים למחצה של מתח האספקה.
פשוט ביותר, מהירות הסיבוב במגבלות קטנות עבור מנועים אלה מווסתת על ידי שינוי מתח האספקה; לשם כך, נגדים או משנקים נוספים מחוברים בסדרה עם הסליל.
עוד בברית המועצות פותחו מנועי קבלים בעלי שני מהירויות מסוג DASM-2 ו-DASM-4 עם מוטות 16/2 להנעת מכונות כביסה אוטומטיות ביתיות.
מנוע ה-DASM -2 מיועד להניע מכונות כביסה אוטומטיות בעלות קיבולת של 4 - 5 ק"ג של פשתן יבש. הוא תוכנן במקור להספקים של 75/400 W ב-390/2750 סל"ד.
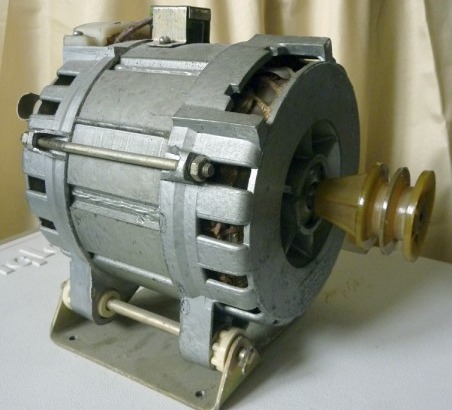
אורז. 5. מנוע חשמלי אסינכרוני עם שני מהירויות, מסוג DASM-2
באיור. 5 מציג את הדיאגרמות לחיבור מנועי DASM-2 ו-DASM-4 לרשת החשמל. כפי שניתן לראות מהאיור, למנוע DASM-2 יש ארבע פיתולי סטטור. הפיתולים הראשוניים והעזר מחוברים במקביל.
מנוע DASM-4 במהירות נמוכה עשוי עם חיבור כוכב תלת פאזי, ובמהירות גבוהה - עם חיבור מקביל של פיתולי הסטטור. ממסר טמפרטורה RK-1-00 מחובר לסטטור של המנוע כדי להגן על הפיתולים במצבי עומס יתר וקצר חשמלי. מגעי הממסר הסגורים בדרך כלל מחוברים למסוף המשותף של הסטטור המנוע.
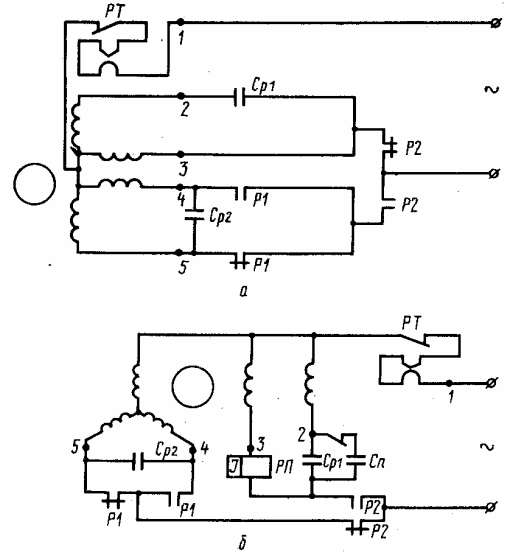
אורז. 5. ערכות חיבור מנועים חשמליים דו-מהירות לרשת אספקת החשמל: a- מנוע חשמלי DASM-2; ב - מנוע חשמלי DASM-4. אני הולך. - סלילה ראשי; V.O, - סליל עזר; 1 - פלט נפוץ של סלילים במהירות נמוכה וגבוהה; 2 - סוף פיתול העזר המהיר; 3 - תחילת הפיתול הראשי במהירות גבוהה; 4 - תחילת סלילה העזר במהירות נמוכה; 5 - תחילת הפיתול הראשי במהירות נמוכה; Cp - קבל הפעלה; Cn - קבל מתחיל; ממסר הגנה תרמית RT, סוג RK-1-00; ממסר התנעה RP, סוג RTK-1-11; P1, P2 - אנשי קשר של הבקר.