מאפיינים של מנועי אינדוקציה חד פאזיים
מנועים אסינכרוניים חד פאזיים נמצאים בשימוש נרחב בטכנולוגיה ובחיי היומיום. הייצור של מנועים חשמליים אסינכרוניים חד פאזיים משבריר וואט ועד מאות וואט הוא יותר ממחצית מהייצור של כל המכונות בעלות הספק נמוך, וההספק שלהם גדל כל הזמן.
מנועים חד פאזיים מחולקים בדרך כלל לשתי קטגוריות:
-
מנועים לשימוש כללי « הכוללים מנועים חשמליים תעשייתיים וביתיים;
-
מנועים של מכשירים אוטומטיים - מנועי AC מבוקרים ובלתי מבוקרים ומכונות חשמליות מיוחדות בעלות הספק נמוך (טכוגנרטורים, שנאים סיבוביים, סלסין וכו').
חלק ניכר מהמנועים החשמליים האסינכרוניים הם מנועים למטרות כלליות המיועדים לפעול על רשת AC חד פאזית. עם זאת, ישנה קבוצה נרחבת למדי של מנועים חשמליים אסינכרוניים אוניברסליים המיועדים לעבודה ברשתות חד-פאזיות ותלת-פאזיות כאחד.
העיצוב של מנועים אוניברסליים כמעט ואינו שונה עיצוב מסורתי של מכונות אסינכרוניות תלת פאזיות... כאשר פועלים על רשת תלת פאזית, למנועים אלו יש מאפיינים דומים לאלו של מנועים תלת פאזיים.
למנועים חד פאזיים יש רוטור של כלוב סנאי, וניתן לייצר את פיתול הסטטור בגרסאות שונות. לרוב, סלילה עובדת הממלאת שני שליש מהחריצים וסלילה מתחילה הממלאת את השליש הנותר מהחריצים מונחות על הסטטור. סליל ההפעלה מחושב עבור פעולה רציפה וסליל ההתחלה מחושב רק עבור תקופת ההתחלה. לכן, הוא עשוי חוט עם חתך קטן ומכיל מספר לא מבוטל של סיבובים. כדי ליצור מומנט התחלתי, מתפתלת ההתחלה כוללת אלמנטים מעבירי פאזה - נגדים או קבלים.
מנועים אסינכרוניים בעלי הספק נמוך יכולים להיות דו-פאזיים כאשר בפיתול העבודה המוצב על הסטטור יש שני שלבים מעורבבים בחלל ב-90 מעלות. באחד מהשלבים, כל הזמן כלול אלמנט מחליף פאזה - קבל או נגד העליון, המספקים הסטת פאזה מסוימת בין זרמי הסליל.
זה נקרא בדרך כלל מנוע עם קבל המחובר באופן קבוע לאחד הפאזות קַבָּל... הקיבול של קבל הסטת הפאזות עשוי להיות קבוע, אך במקרים מסוימים ערך הקיבול עשוי להיות שונה עבור הפעלה ומצב ריצה.
תכונה אופיינית של מנועים אסינכרוניים חד פאזיים היא היכולת לסובב את הרוטור לכיוונים שונים. כיוון הסיבוב נקבע לפי כיוון המומנט הראשוני.
בהתנגדות רוטור נמוכה (Ccr < 1), לפיכך, מנוע חד פאזי אינו יכול לפעול במצב הפוך. מצב המנוע מתאים לסיבובי הרוטור 0 <n <nc במהירות גבוהה יותר מתרחש מצב הגנרטור.
מאפיין של מנועים חד פאזיים הוא שהמומנט המרבי שלו תלוי בהתנגדות הרוטור. ככל שההתנגדות הפעילה של הרוטור עולה, המומנט המרבי יורד ועם ערכי התנגדות גדולים של Skr > 1 הוא הופך לשלילי.
כאשר בוחרים את סוג המנוע החשמלי להנעת מכשיר או מנגנון, יש צורך להכיר את מאפייניו, העיקריים שבהם הם מאפייני מומנט (מומנט התנעה ראשוני, מומנט מרבי, מומנט מינימלי), תדירות סיבוב, מאפיינים ויברואקוסטיים. במקרים מסוימים נדרשים גם מאפייני אנרגיה ומשקל.
כדוגמה, המאפיינים של מנוע חד פאזי מחושבים עם הפרמטרים הבאים:
-
מספר שלבים - 1;
-
תדר רשת - 50 הרץ;
-
מתח רשת - 220 וולט;
-
התנגדות אקטיבית של מתפתל הסטטור - 5 אוהם;
-
התנגדות אינדוקטיבית של סלילה הסטטור - 9.42 אוהם;
-
התנגדות אינדוקטיבית של מתפתל הרוטור - 5.6 אוהם;
-
אורך צירי של המכונה - 0.1 מ';
-
מספר הסיבובים בפיתול הסטטור -320;
-
רדיוס חור סטטור - 0.0382 מ';
-
מספר ערוצים - 48;
-
פער אוויר - 1.0 x 103 מ'.
-
גורם השראות הרוטור 1.036.
הפיתול החד-פאזי ממלא שני שליש מחריצי הסטטור.
באיור. 1 מציג את התלות של הזרם של מנוע חשמלי חד פאזי ומומנט ההחלקה האלקטרומגנטי. במצב סרק אידיאלי, לזרם המנוע הנצרך על ידי הרשת, בעיקר כדי ליצור שדה מגנטי, יש ערך גדול יחסית.
עבור מנוע מדומה, גודל הזרם הממגנט הוא כ-30% מהזרם ההתחלתי, עבור מנועים תלת פאזיים עם אותו הספק - 10-15%.למומנט האלקטרומגנטי במצב סרק אידיאלי יש ערך שלילי, שגדל ככל שההתנגדות של מעגל הרוטור עולה. בְּ מַחלִיק C= 1, המומנט האלקטרומגנטי הוא אפס, מה שמאשר את הפעולה הנכונה של המודל.
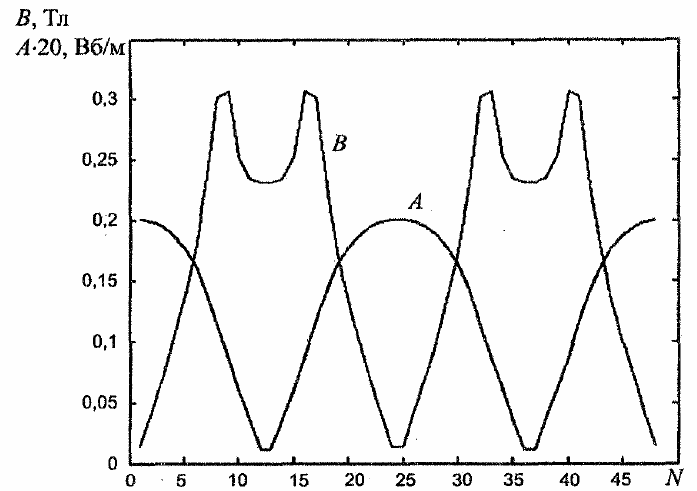
תאנה. 1. המעטפות של פוטנציאל וקטור ואינדוקציה מגנטית במרווח המנוע במהלך הזזה s = 1
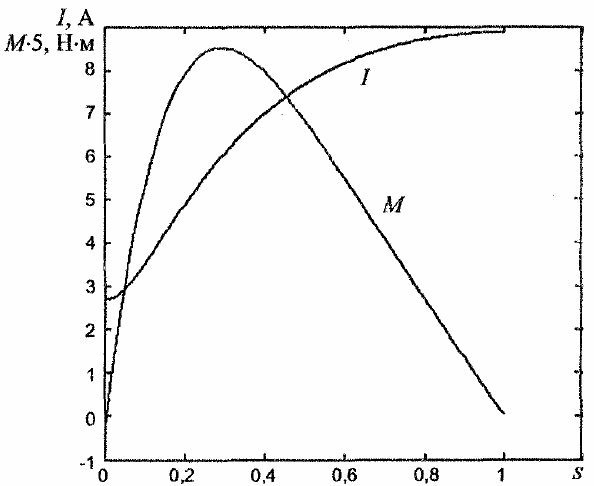
אורז. 2. תלות של זרם ומומנט אלקטרומגנטי של מנוע אסינכרוני חד פאזי בהחלקה
לתלות של כוח שימושי ונצרך בהחלקה (איור 3) יש אופי מסורתי. ליעילות המנוע במצב סרק אידיאלי יש סימן שלילי המתאים למומנט השלילי, ומקדם ההספק במצב זה נמוך מאוד (0.125 למנוע המדומה).
הערך הנמוך יותר של גורם ההספק בהשוואה למנועים תלת פאזיים מוסבר על ידי הגודל הגבוה של זרם הממגנט. ככל שהעומס גדל, ערך מקדם ההספק עולה והופך להיות דומה לזה של מנועים תלת פאזיים (איור 4).
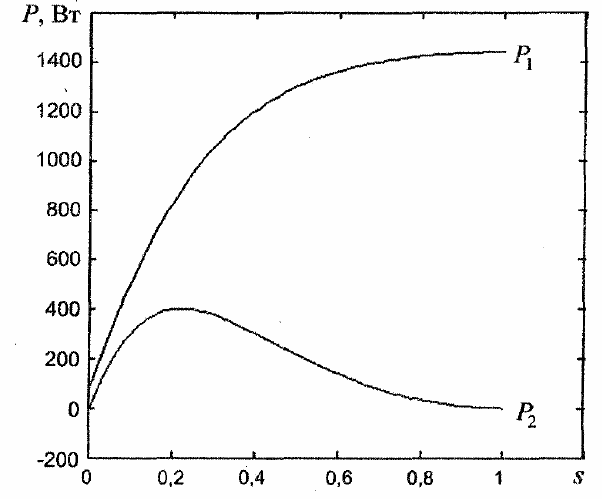
אורז. 3. תלות בכוח השימושי והצורך של מנוע אסינכרוני חד פאזי בהחלקה
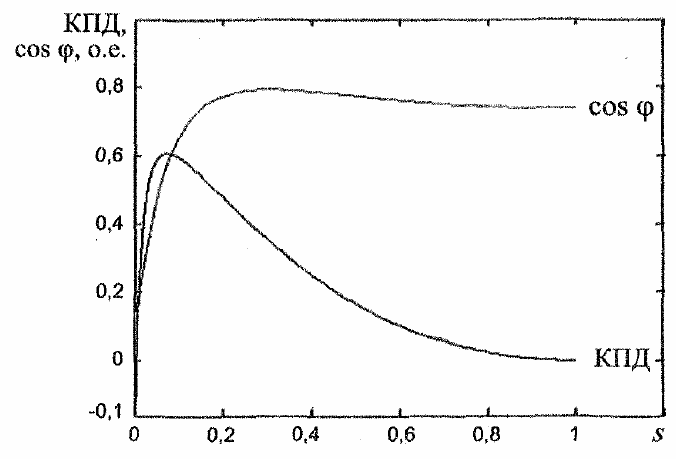
אורז. 4. תלות של מקדם הפעולה השימושית והכוח של מנוע אסינכרוני חד פאזי בהחלקה
ככל שההתנגדות הפעילה של הרוטור גדלה, גודל המומנט האלקטרומגנטי פוחת, ובהחלקות קריטיות מעל האחדות, הוא הופך לשלילי.
באיור. 5 מציג את התלות של המומנט האלקטרומגנטי של מנוע החלקה חד פאזי עבור ערכים שונים של המוליכות החשמלית של המדיום המשני של המנוע.
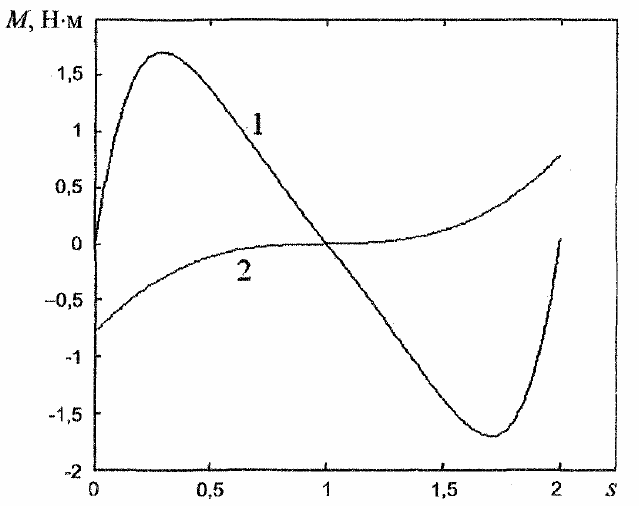
אורז. 5.תלות במומנט האלקטרומגנטי של מנוע החלקה חד פאזי בהתנגדויות רוטור שונות (1 - 17 x 106 ס"מ / מ', 2 - 1.7 x 106 ס"מ / מ')
למנועי קבלים יש שתי פיתולים המחוברים באופן קבוע לרשת. אחד מהם מחובר ישירות לרשת, השני מחובר בסדרה עם קבל המספק את הסטת הפאזה הדרושה.
שתי הפיתולים תופסים את אותו מספר חריצים על הסטטור, ומספר הסיבובים שלהם והקיבול של הקבל מחושבים בצורה כזו שעם החלקה מסוימת מסופק שדה מגנטי מסתובב מעגלי. לרוב, התלוש הנומינלי מתקבל ככזה. אולם במקרה זה, המומנט הראשוני מתברר כהרבה יותר קטן מהנומינלי.
השדה המגנטי במצב ההתחלתי הוא אליפטי; ההשפעה של הרכיבים הנעים נגדי של השדה המגנטי מושפעת מאוד. אם הקיבול של הקבל גדל ע"י בחירתו ממצב של קבלת שדה מעגלי בעת ההפעלה, אז יש ירידה במומנט ו- ירידה במחווני האנרגיה בהחלקה נומינלית.
גרסה שלישית אפשרית גם, כאשר השדה המעגלי מתאים להחלקה בגודל גדול יותר מאשר במצב הנומינלי. אבל גם נתיב זה אינו אופטימלי, שכן העלייה במומנט מלווה בעלייה משמעותית בהפסדים. ניתן להשיג עלייה במומנט ההתחלה של מנוע קבלים על ידי הגדלת ההתנגדות הפעילה של הרוטור. שיטה זו מביאה לעלייה בהפסדים עם כל החלקה, וכתוצאה מכך יעילות המנוע יורדת.
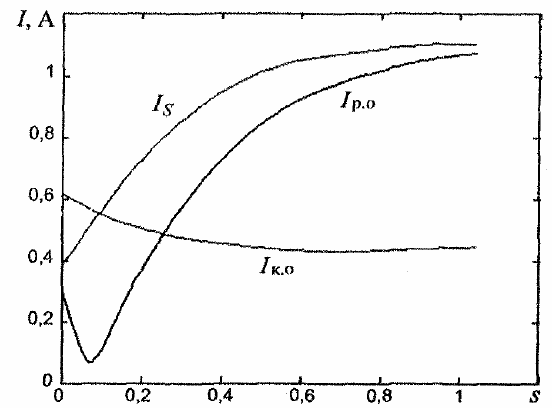
אורז. 6.תלות של זרמי מנוע קבל החלקה (Azp.o - זרם סליל הפעלה, Azk.o - זרם סליל קבלים, E - זרם מנוע)
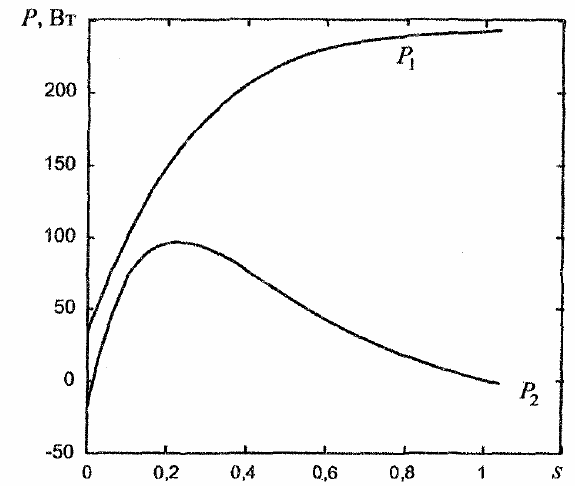
אורז. 7. תלות בכוח ההחלקה P1 הנצרך ובכוח ההחלקה השימושי של P2 של קבל
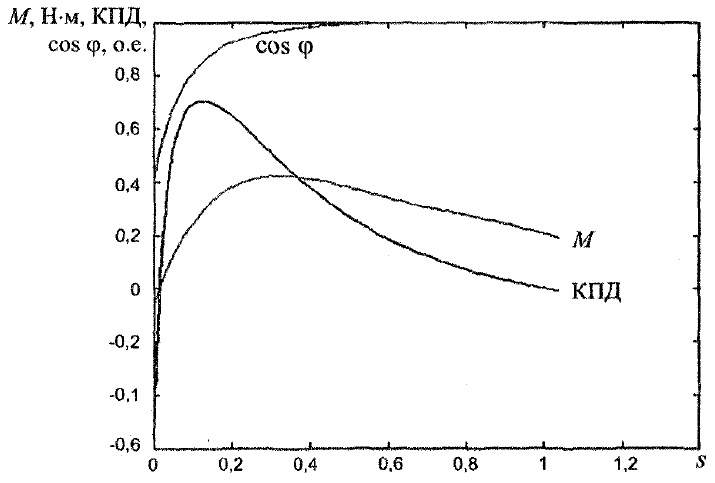
אורז. 8. תלות של מקדם הפעולה והכוח השימושיים והמומנט האלקטרומגנטי של מנוע קבל ההחלקה
למנוע הקבלים יש ביצועים אנרגטיים מספקים למדי, מקדם הספק גבוה, שערכו עולה על מקדם ההספק של מנוע תלת פאזי, ועם התנגדות רוטור מוגברת וקיבולת משמעותית, מומנט התנעה גבוה. יחד עם זאת, כאמור לעיל, למנוע ערך יעילות מופחת.
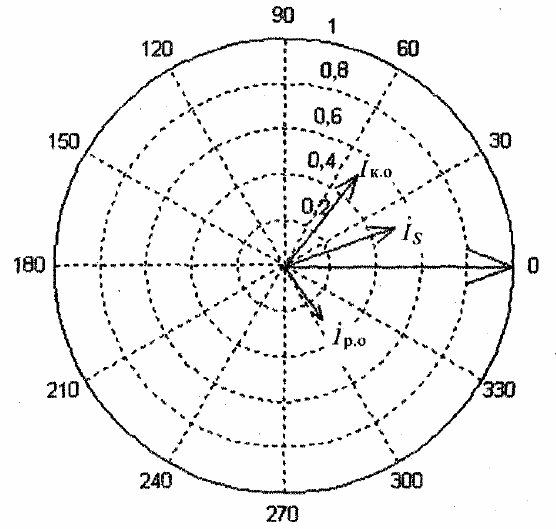
אורז. 9. דיאגרמת וקטור של מנוע קבלים בהחלקה s = 0.1
הדיאגרמה הווקטורית (איור 9) מראה שבערך הנבחר של קיבול הקבל, זרם סליל הקבל מוביל ביחס למתח הרשת, וזרם סליל העבודה בפיגור. התרשים גם מראה שכאשר מחליקים קרוב לנומינלי, השדה המגנטי של המנוע הוא אליפטי. כדי לקבל שדה מעגלי, יש להפחית את ערך הקיבול של הקבל כך שהזרמים בשני הסלילים יהיו שווים בגודלם.
ראה גם בנושא זה:מנועי קבל חד פאזי רב מהירויות