מכונות חשמל זרם חילופין
מכונות חשמליות משמשות להמרת אנרגיה מכנית לאנרגיה חשמלית (גנרטורים AC ו-DC) ולהיפך (מנועים חשמליים).
בכל המקרים הללו, בעצם נעשה שימוש בשלוש תגליות עיקריות בתחום האלקטרומגנטיות: תופעת האינטראקציה המכאנית של זרמים שהתגלתה על ידי אמפר ב-1821, תופעת האינדוקציה האלקטרומגנטית שהתגלתה על ידי פאראדיי ב-1831, והסיכום התיאורטי של תופעות אלו. לנץ (1834) בחוק הידוע שלו בדבר כיוון הזרם המושרה (למעשה, חוק לנץ חזה את חוק שימור האנרגיה לתהליכים אלקטרומגנטיים).

על מנת להמיר אנרגיה מכנית לאנרגיה חשמלית או להיפך, יש צורך ליצור תנועה יחסית של מעגל מוליך עם זרם ושדה מגנטי (מגנט או זרם).
במכונות חשמליות המיועדות לפעולה רציפה, נעשה שימוש בתנועה הסיבובית של החלק הנע של המכונה (הרוטור של מכונת הזרם החילופין) הנמצא בתוך החלק הנייח (הסטטור).סליל המכונה המשמש ליצירת השדה המגנטי נקרא משרן, והסליל שזורם מסביב עם זרם הפעלה נקרא אבזור. שני המונחים האחרונים הללו משמשים גם עבור מכונות DC.
כדי להגביר את האינדוקציה המגנטית, פיתולי מכונה ממוקמים על גופים פרומגנטיים (פלדה, ברזל יצוק).
לכל המכונות החשמליות יש תכונה של הפיכות, כלומר, הן יכולות לשמש הן כמחוללי אנרגיה חשמלית והן כמנועים חשמליים.

מנועים אסינכרוניים
משתמשים במנועים אסינכרוניים אחד הביטויים של אינדוקציה אלקטרומגנטית... בקורסי פיזיקה זה מודגם באופן הבא:
מתחת לדיסק נחושת, שיכול להסתובב סביב ציר אנכי העובר במרכזה, מוצב מגנט פרסה אנכי המונע להסתובב סביב אותו ציר (האינטראקציה המכנית בין הדיסק למגנט אינה נכללת). במקרה זה, הדיסק מתחיל להסתובב באותו כיוון כמו המגנט, אך במהירות נמוכה יותר. אם אתה מגדיל את העומס המכני על הדיסק (לדוגמה, על ידי הגדלת החיכוך של הציר נגד מיסב הדחף), אז מהירות הסיבוב שלו יורדת.
המשמעות הפיזית של תופעה זו מוסברת בקלות על ידי תיאוריית האינדוקציה האלקטרומגנטית: כאשר המגנט מסתובב, נוצר שדה מגנטי מסתובב, אשר משרה זרמי מערבולת בדיסק, גודלו של האחרון תלוי, בהיותם דברים שווים, ב- מהירות יחסית של השדה והדיסק.
לפי חוק לנץ, הדיסק חייב להסתובב לכיוון השדה. בהיעדר חיכוך, על הדיסק לרכוש מהירות זוויתית השווה למהירות המגנט, ולאחר מכן ייעלם ה-emf המושרה. בחיים האמיתיים, חיכוך קיים בהכרח והדיסק נעשה איטי יותר.עוצמתו תלויה ברגע הבלימה המכני שחווה הדיסק.
הפער בין מהירות הסיבוב של הדיסק (רוטור) למהירות הסיבוב של השדה המגנטי בא לידי ביטוי בשם המנועים.
עקרון הפעולה של מנועים אסינכרוניים:
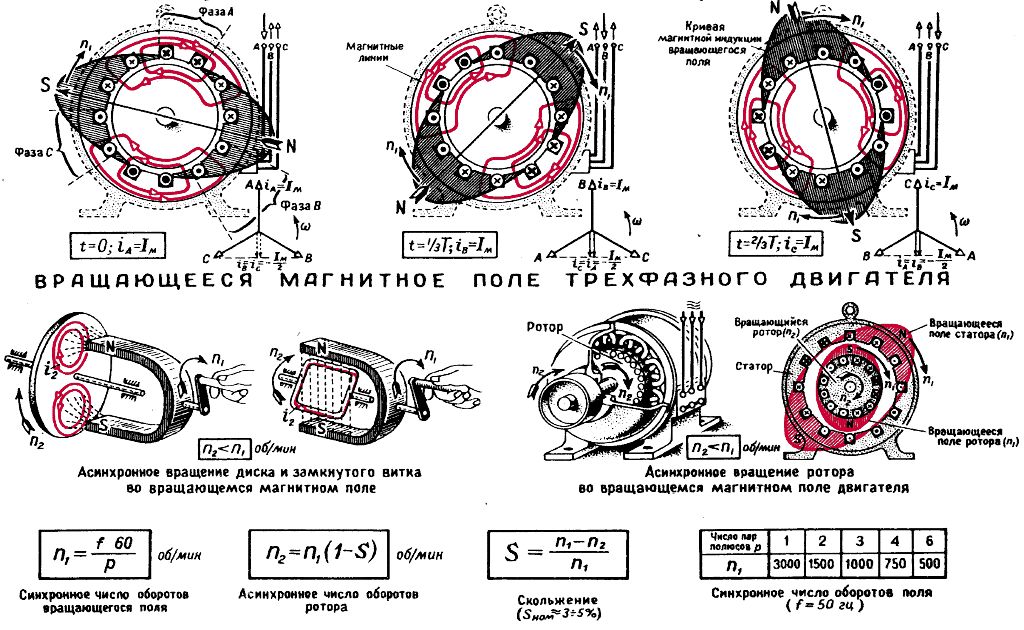
במנועים אסינכרוניים טכניים (לרוב תלת פאזיים) נוצר שדה מגנטי מסתובב זרם רב פאזיזורם סביב מתפתל הסטטור הנייח. בתדירות של זרם תלת פאזי הוא ומספר סלילי הסטטור 3p שדה מסתובב עושה n = f / p סיבובים / שניות.

רוטור מסתובב ממוקם בחלל הסטטור. לציר שלו ניתן לחבר מנגנון מסתובב, במנועי "תא הסנאי" הפשוטים ביותר, הרוטור מורכב ממערכת של מוטות מתכת אורכיים המוצבים בחריצים של גוף גלילי פלדה. החוטים קצרים על ידי שתי טבעות. כדי להגדיל את המומנט, רדיוס הרוטור נעשה מספיק גדול.
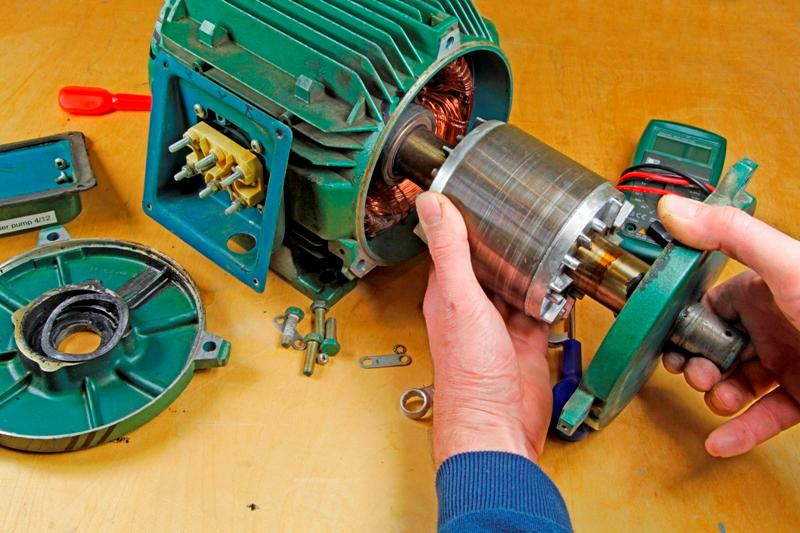
בעיצובי מנועים אחרים (בדרך כלל מנועים בהספק גבוה), חוטי הרוטור יוצרים פיתול תלת פאזי פתוח. קצוות הסלילים קצרים ברוטור עצמו, והמובילים מובאים החוצה לשלוש טבעות החלקה המותקנות על ציר הרוטור ומבודדות ממנו.
ריאוסטט תלת פאזי מחובר לטבעות אלו באמצעות מגעים הזזה (מברשות), המשמשים להפעלת המנוע בתנועה. לאחר סיבוב המנוע, הראוסטט מוסר לחלוטין והרוטור הופך לכלוב סנאי (ראה - מנועים אסינכרוניים עם רוטור מפותל).

יש לוח מסוף על בית הסטטור. פיתולי הסטטור מובאים אליהם. ניתן לכלול אותם כוכב או משולש, בהתאם למתח הרשת: במקרה הראשון מתח הרשת יכול להיות גבוה פי 1.73 מהשני.
הערך המאפיין את האטה היחסית של הרוטור בהשוואה לשדה הסטטור של מנוע האינדוקציה נקרא מַחלִיק... זה משתנה מ-100% (ברגע הפעלת המנוע) לאפס (מקרה אידיאלי של תנועת רוטור ללא אובדן).
היפוך כיוון הסיבוב של מנוע האינדוקציה מושג על ידי מיתוג הדדי של כל שני מוליכים ליניאריים של רשת החשמל המספקת את המנוע.

מנועי כלוב סנאי נמצאים בשימוש נרחב בתעשייה. היתרונות של מנועים אסינכרוניים הם פשטות העיצוב והיעדר מגעים הזזה.
עד לאחרונה, החיסרון העיקרי של מנועים כאלה היה הקושי בוויסות המהירות, כי אם המתח של מעגל הסטטור משתנה לשם כך, אז המומנט משתנה בחדות, אבל היה קשה מבחינה טכנית לשנות את תדירות זרם האספקה. התקני מיקרו-מעבד מודרניים נמצאים כיום בשימוש נרחב כדי לשלוט בתדירות זרם האספקה כדי לשנות את מהירות המנועים - ממירי תדרים.
אלטרנטורים
אלטרנטורים בנויים להספק משמעותי ולמתח גבוה. כמו מכונות אסינכרוניות, יש להן שתי פיתולים. בדרך כלל, מתפתל האבזור ממוקם בבית הסטטור. המשרנים היוצרים את השטף המגנטי הראשוני מותקנים על הרוטור ומופעלים על ידי מעורר - גנרטור DC קטן המותקן על ציר הרוטור. במכונות בעלות הספק גבוה, העירור נוצר לפעמים על ידי מתח חילופין מתוקן.
בשל חוסר התנועה של מתפתל האבזור, הקשיים הטכניים הקשורים לשימוש במגעי הזזה בהספקים גבוהים נעלמים.
האיור שלהלן מציג סכימה של מחולל חד פאזי. לרוטור שלו שמונה קטבים. על אלה סלילים פתולים (לא מוצג באיור) המוזנים ממקור חיצוני על ידי זרם ישר המופעל על טבעות החלקה המותקנות על ציר הרוטור. סלילי המוט מפותלים בצורה כזו שסימני הקטבים הפונים אל הסטטור מתחלפים. מספר הקטבים חייב להיות זוגי.
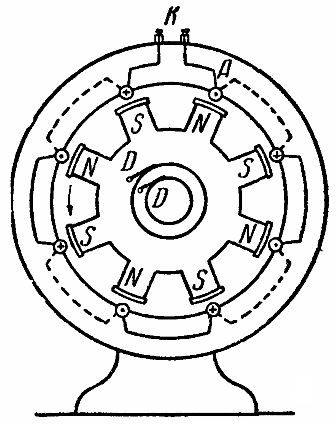
מתפתל האבזור ממוקם בבית הסטטור. החוטים ה"פעילים" הארוכים שלו, בניצב למישור הציור, מוצגים באיור עם עיגולים, הם נחצים על ידי קווי האינדוקציה המגנטית כאשר הרוטור מסתובב.
המעגלים מראים את ההתפלגות המיידית של כיווני השדות החשמליים המושרים. חוטי החיבור העוברים לאורך הצד הקדמי של הסטטור מוצגים בקווים מלאים, ובצד האחורי עם קווים מקווקוים. מלחציים K משמשים לחיבור מעגל חיצוני לפיתול הסטטור. כיוון הסיבוב של הרוטור מצוין על ידי חץ.
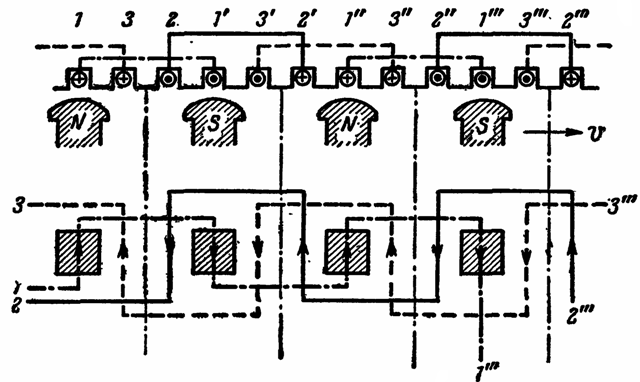
אם אתה חותך את המכונה מנטלית לאורך רדיוס העובר בין המהדקים K ותהפוך אותה למישור, אז המיקום היחסי של מתפתל הסטטור ומוטות הרוטור (צד ותוכנית) יתואר בשרטוט סכמטי:
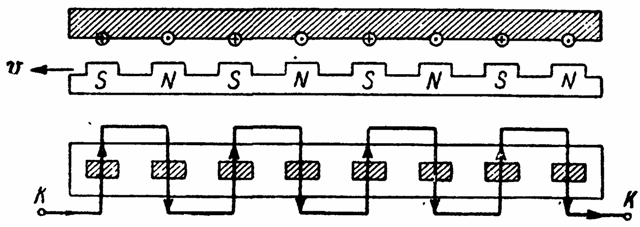
בהתחשב באיור, אנו מוודאים שכל החוטים הפעילים (העוברים דרך הקטבים של המשרן) מחוברים זה לזה בסדרה ומסכמים את ה-EMF המושרה בהם. השלבים של כל EMF הם ללא ספק זהים.במהלך סיבוב שלם אחד של הרוטור יתקבלו ארבע תקופות שלמות של שינוי זרם בכל אחד מהחוטים (ולכן במעגל החיצוני).
אם למכונה חשמלית יש p זוגות של קטבים והרוטור מסתובב תוך n סיבובים בשנייה, אזי התדירות של זרם החילופין שמקבלת המכונה היא f = pn hz.
מכיוון שתדירות ה-EMF ברשת חייבת להיות קבועה, מהירות הסיבוב של הרוטורים חייבת להיות קבועה. כדי להשיג EMF בתדר טכני (50 הרץ), ניתן להשתמש בסיבוב איטי יחסית אם מספר עמודי הרוטור גדול מספיק.
כדי להשיג זרם תלת פאזי, שלוש פיתולים נפרדים ממוקמים בגוף הסטטור. כל אחד מהם מוסט ביחס לשני האחרים בשליש ממרחק הקשת בין הקטבים הסמוכים (המנוגדים) של המשרנים.
קל לאמת שכאשר המשרנים מסתובבים, נגרמות EMF בסלילים המוזזים בשלב (בזמן) ב-120 מעלות. קצוות הסלילים מוסרים מהמכונה וניתן לחבר אותם בכוכב או בדלתא.
בגנרטור, המהירות היחסית של השדה והמוליך נקבעת לפי קוטר הרוטור, מספר הסיבובים של הרוטור בשנייה ומספר זוגות הקטבים.

אם הגנרטור מונע על ידי זרם מים (הידרוגנרטור), הוא נעשה בדרך כלל עם סיבובים איטיים. כדי להשיג את תדר הזרם הרצוי, יש צורך להגדיל את מספר הקטבים, אשר בתורו דורש הגדלת קוטר הרוטור.
מכמה סיבות טכניות מחוללי מימן חזקים בדרך כלל יש להם פיר אנכי והם ממוקמים מעל הטורבינה ההידראולית, מה שגורם להם להסתובב.

גנרטורים מונעי טורבינת קיטור - גנרטורים של טורבינות הם בדרך כלל מהירים. על מנת להפחית כוחות מכניים יש להם קטרים קטנים ומספר קטן של קטבים בהתאם, מספר שיקולים טכניים מחייבים ייצור של גנרטורים טורבינות עם ציר אופקי.
אם הגנרטור מונע על ידי מנוע בעירה פנימית, הוא נקרא גנרטור דיזל, שכן מנועי דיזל משמשים בדרך כלל כמנועים הצורכים דלק זול יותר.

הפיכות גנרטור, מנועים סינכרוניים
אם מתח חילופין מופעל על פיתול הסטטור של הגנרטור ממקור חיצוני, אז תהיה אינטראקציה של הקטבים של המשרן עם השדה המגנטי של הזרם שנוצר בסטטור, ומומנטים מאותו כיוון יפעלו. על כל המוטות.
אם הרוטור מסתובב במהירות כזו שזמן קצר לאחר מחצית מתקופת זרם החילופין, הקוטב הבא של המשרן (מנוגד בסימן לקוטב הראשון) יתאים מתחת לחוט הנחשב של פיתול הסטטור, אז הסימן של כוח האינטראקציה בינו לבין הזרם, ששינה את כיוונו, יישאר זהה.
בתנאים אלה, הרוטור, בהיותו תחת השפעה מתמשכת של המומנט, ימשיך לנוע ויוכל להניע כל מנגנון. התגברות על ההתנגדות לתנועת הרוטור תתרחש עקב האנרגיה הנצרכת על ידי הרשת, ו הגנרטור יהפוך למנוע חשמלי.

עם זאת, יש לציין כי תנועה רציפה אפשרית רק במהירות סיבוב מוגדרת בהחלט, שכן במקרה של סטייה ממנה מומנט האצה יפעל חלקית על כל אחד מהקטבים של הרוטור, שינוע בין שני המוליכים של ה-. סטטור, חלק מהזמן - עוצר .
לפיכך, יש לקבוע בקפדנות את מהירות הסיבוב של המנוע, - הזמן שבו הקוטב מוחלף בעמוד הבא חייב להיות בקנה אחד עם חצי התקופה של הזרם, וזו הסיבה שמנועים כאלה נקראים באופן סינכרוני.
אם מתח חילופין מופעל על הסטטור המתפתל עם רוטור נייח, אז למרות שכל הקטבים של הרוטור במהלך חצי המחזור הראשון של הזרם חווים את פעולת המומנטים של אותו סימן, עדיין, בגלל האינרציה, לרוטור לא יהיה זמן לזוז. בחצי המחזור הבא, סימן המומנטים של כל עמודי הרוטור ישתנה להיפך.
כתוצאה מכך, הרוטור ירטוט אך לא יוכל להסתובב. לכן, תחילה יש להרים את המנוע הסינכרוני, כלומר להביא למספר הסיבובים הרגיל, ורק אז יש להפעיל את הזרם בפיתול הסטטור.
הפיתוח של מנועים סינכרוניים מתבצע בשיטות מכניות (בהספקים נמוכים) ומכשירים חשמליים מיוחדים (בהספקים גבוהים).
עבור שינויים בעומס קטן, מהירות המנוע תשתנה אוטומטית כדי להתאים את העומס החדש. לכן, ככל שהעומס על פיר המנוע גדל, הרוטור מאט מיד. לכן, הסטת הפאזה בין מתח הקו לבין EMF המושרה הנגדי המושרה על ידי המשרן בפיתול הסטטור משתנה.
בנוסף, תגובת האבזור יוצרת דה-מגנטיזציה של המשרנים, כך שזרם הסטטור גדל, המשרנים חווים מומנט מוגבר, והמנוע מתחיל להסתובב שוב באופן סינכרוני, ומתגבר על העומס המוגבר. תהליך דומה מתרחש עם הפחתת עומס.
עם תנודות חדות בעומס, יכולת הסתגלות זו של המנוע עלולה להיות בלתי מספקת, מהירותו תשתנה באופן משמעותי, הוא "תיפול מסנכרון" ובסופו של דבר ייפסק, בעוד EMF האינדוקציה המושרה בסטטור נעלם, והזרם בו גדל באופן חד. לכן יש להימנע מתנודות חדות בעומס. כדי לעצור את המנוע, ברור שתחילה עליך לנתק את מעגל הסטטור ולאחר מכן לנתק את המשנקים; בעת התנעת המנוע, עליך להקפיד על סדר פעולות הפוך.
מנועים סינכרוניים משמשים לרוב להנעת מנגנונים הפועלים במהירות קבועה. להלן היתרונות והחסרונות של מנועים סינכרוניים ושיטות ההפעלה שלהם: מנועים סינכרוניים והיישומים שלהם
רצועת סרטים חינוכיים - "מנועים סינכרוניים", שנוצרה על ידי מפעל העזרים החינוכיים-חזותיים ב-1966. אתה יכול לצפות בו כאן: סרט "מנוע סינכרוני"
