הגדלת גורם ההספק במעגלי זרם סינוסואידים
 לרוב הצרכנים המודרניים של אנרגיה חשמלית יש אופי אינדוקטיבי של העומס, שהזרמים שלו מפגרים מאחורי מתח המקור. אז עבור מנועי אינדוקציה, רוֹבּוֹטרִיקִים, מכונות ריתוך יש צורך בזרם תגובתי אחר כדי ליצור שדה מגנטי מסתובב במכונות חשמליות ושטף מגנטי לסירוגין בשנאים.
לרוב הצרכנים המודרניים של אנרגיה חשמלית יש אופי אינדוקטיבי של העומס, שהזרמים שלו מפגרים מאחורי מתח המקור. אז עבור מנועי אינדוקציה, רוֹבּוֹטרִיקִים, מכונות ריתוך יש צורך בזרם תגובתי אחר כדי ליצור שדה מגנטי מסתובב במכונות חשמליות ושטף מגנטי לסירוגין בשנאים.
הכוח הפעיל של צרכנים כאלה בערכים הנתונים של זרם ומתח תלוי בעלות φ:
P = UICosφ, I = P / UCosφ
ירידה בגורם ההספק מובילה לעלייה בזרם.
קוסינוס פי הוא מופחת במידה רבה במיוחד כאשר מנועים ושנאים נמצאים במצב סרק או תחת עומס כבד. אם לרשת יש זרם תגובתי, הספק של הגנרטור, תחנות השנאים והרשתות אינו מנוצל במלואו. ככל שה-cosφ יורד, הם גדלים באופן משמעותי אובדן אנרגיה לחימום חוטי וסלילים של מכשירים חשמליים.
 לדוגמה, אם ההספק האמיתי נשאר קבוע, הוא מסופק עם זרם של 100 A ב-cosφ= 1, ואז עם ירידה ב-cosφ ל-0.8 ובאותה הספק, הזרם ברשת גדל פי 1.25 (I = Inetwork x cosφ , Azac = Aza / cosφ ).
לדוגמה, אם ההספק האמיתי נשאר קבוע, הוא מסופק עם זרם של 100 A ב-cosφ= 1, ואז עם ירידה ב-cosφ ל-0.8 ובאותה הספק, הזרם ברשת גדל פי 1.25 (I = Inetwork x cosφ , Azac = Aza / cosφ ).
הפסדים על החוטים של רשת החימום ופיתולים של גנרטור (שנאי) Pload = I2nets x Rnets פרופורציונליים לריבוע הזרם, כלומר, הם גדלים פי 1.252 = 1.56 פעמים.
ב-cosφ= 0.5, הזרם ברשת עם אותו הספק פעיל שווה ל-100 / 0.5 = 200 A, וההפסדים ברשת גדלים פי 4 (!). זה הולך וגדל הפסדי מתח ברשתמה שמשבש את פעולתם הרגילה של משתמשים אחרים.
מד המשתמש מדווח בכל המקרים על אותה כמות אנרגיה פעילה שנצרכה ליחידת זמן, אך במקרה השני הגנרטור מזין את הרשת בזרם גדול פי 2 מזה שבראשון. עומס הגנרטור (מצב תרמי) נקבע לא על ידי ההספק הפעיל של הצרכנים, אלא על ידי ההספק הכולל בקילו-וולט-אמפר, כלומר, תוצר המתח על ידי אמפרזורם דרך הסלילים.
אם נסמן את ההתנגדות של החוטים של הקו Rl, אז ניתן לקבוע את אובדן הכוח בו באופן הבא:
לכן, ככל שהמשתמש גדול יותר, הפסדי החשמל בקו יהיו קטנים יותר והולכת החשמל זולה יותר.
מקדם ההספק מראה כיצד נעשה שימוש בהספק המדורג של המקור. אז, כדי לספק למקלט 1000 קילוואט ב-φ= 0.5, הספק הגנרטור צריך להיות S = P / cosφ = 1000 / 0.5 = 2000 kVA, וב-cosφ = 1 C = 1000 kVA.
לכן, הגדלת מקדם ההספק מגבירה את ניצול החשמל של הגנרטורים.
כדי להגדיל את גורם ההספק (cosφ) נעשה שימוש במתקנים חשמליים פיצוי כוח תגובתי.
הגדלת גורם ההספק (הקטנת הזווית φ - הסטת פאזה של זרם ומתח) יכולה להתבצע בדרכים הבאות:
1) החלפת מנועים בעלי עומס קל במנועים בעלי הספק נמוך יותר,
2) מתחת למתח
3) ניתוק מנועים ושנאים סרק,
4) הכללת התקני פיצוי מיוחדים ברשת, שהם גנרטורים של הזרם המוביל (קיבולי).
למטרה זו, מפצים סינכרוניים - מנועים חשמליים סינכרוניים בעלי התרגשות יתר - מותקנים במיוחד בתחנות משנה אזוריות חזקות.
 מפצים סינכרוניים
מפצים סינכרוניים
כדי להגביר את היעילות של תחנות כוח, בנקים הקבלים הנפוצים ביותר מחוברים במקביל לעומס האינדוקטיבי (איור 2 א).
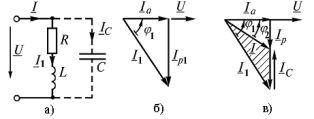
אורז. 2 הפעלת קבלים לפיצוי הספק תגובתי: a — מעגל, b, c — דיאגרמות וקטוריות
כדי לפצות cosφ במתקנים חשמליים עד כמה מאות kVA הם משמשים קבלים של קוסינוס... הם מיוצרים עבור מתחים מ-0.22 עד 10 קילו וולט.
ניתן לקבוע מהדיאגרמה את הקיבולת של הקבל הנדרש להגדלת cosφ מהערך הקיים cosφ1 ל-cosφ2 הנדרש (איור 2 ב, ג).
 בעת בניית דיאגרמת וקטור, וקטור מתח המקור נלקח כווקטור ההתחלתי. אם העומס הוא אינדוקטיבי, אז וקטור הזרם Az1 מפגר מאחורי הזווית של וקטור המתח φ1Aza חופף בכיוון המתח, הרכיב התגובתי של הזרם Azp מפגר אחריו ב-90 מעלות (איור 2 ב).
בעת בניית דיאגרמת וקטור, וקטור מתח המקור נלקח כווקטור ההתחלתי. אם העומס הוא אינדוקטיבי, אז וקטור הזרם Az1 מפגר מאחורי הזווית של וקטור המתח φ1Aza חופף בכיוון המתח, הרכיב התגובתי של הזרם Azp מפגר אחריו ב-90 מעלות (איור 2 ב).
לאחר חיבור בנק הקבלים למשתמש, הזרם Az נקבע כסכום גיאומטרי של הוקטורים Az1 ו- Az° C... במקרה זה, וקטור הזרם הקיבולי מקדים לוקטור המתח ב-90° (איור 2, ג). . זה מראה את הדיאגרמה הווקטורית φ2 <φ1, כלומר. לאחר הפעלת הקבל, גורם ההספק עולה מ-cosφ1 ל-cosφ2
ניתן לחשב את הקיבולת של קבל באמצעות דיאגרמת וקטור של זרמים (איור 2 ג) Ic = azp1 — Azr = Aza tgφ1 — Aza tgφ2 = ωCU
בהינתן ש-P = UI, אנו כותבים את הקיבול של הקבל C = (I / ωU) NS (tgφ1 — tgφ2) = (P / ωU2) NS (tgφ1 — tgφ2).
בפועל, גורם ההספק גדל בדרך כלל לא ל-1.0, אלא ל-0.90 - 0.95, שכן פיצוי מלא דורש התקנה נוספת של קבלים, שלעתים קרובות אינה מוצדקת כלכלית.
