הפעלת מנוע רוטור פצע
מאפייני ההתחלה של המנוע האסינכרוני תלויים במאפייני העיצוב שלו, במיוחד במכשיר הרוטור.
ההתנעה של מנוע אינדוקציה מלווה בתהליך חולף של המכונה, הקשור למעבר של הרוטור ממצב מנוחה למצב של סיבוב אחיד, שבו מומנט המנוע מאזן את רגע כוחות ההתנגדות על הציר של המכונה.
בעת הפעלת מנוע אסינכרוני, ישנה צריכה מוגברת של אנרגיה חשמלית מרשת האספקה, המושקעת לא רק כדי להתגבר על מומנט הבלימה המופעל על הציר ולכסות את ההפסדים במנוע האסינכרוני עצמו, אלא גם כדי לתקשר קינטיקה מסוימת. אנרגיה לחוליות הנעות של יחידת הייצור. לכן, בעת התנעה, מנוע האינדוקציה חייב לפתח מומנט מוגבר.
עבור מנוע אינדוקציה עם רוטור, מומנט ההתחלה המתאים להחלקה עם n = 1 תלוי בהתנגדויות האקטיביות של הנגדים המתכווננים המוכנסים למעגל הרוטור.
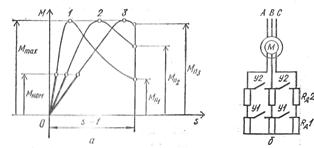
אורז. 1.התנעת מנוע אסינכרוני תלת פאזי עם רוטור פתיל: א - גרפים של תלות המומנט של מנוע עם רוטור פצוע מהחלקה בהתנגדויות אקטיביות שונות של נגדים במעגל הרוטור, ב - מעגל לחיבור נגדים וסגירת מגעים עבור האצה למעגל הרוטור.
אז, עם מגעי האצה סגורים U1, U2, כלומר בעת הפעלת מנוע אינדוקציה עם קצר חשמלי של טבעות החלקה, מומנט ההתחלה הראשוני Mn1 = (0.5 -1.0) Mnom וזרם ההתחלה ההתחלתי Azn = (4.5 - 7) Aznom ו אחרים.
מומנט התנעה קטן של מנוע חשמלי אסינכרוני עם רוטור מפותל עשוי להיות לא מספיק כדי להניע יחידת ייצור ולהאצתה שלאחר מכן, וזרם התנעה משמעותי יוביל לחימום מוגבר של פיתולי המנוע, מה שמגביל את תדירות המיתוג שלו, וברשתות עם הספק נמוך מוביל לירידת מתח זמנית שאינה רצויה לפעולתם של מקלטים אחרים. נסיבות אלה עשויות להיות הסיבה המונעת את השימוש במנועי אינדוקציה עם רוטור פצע עם זרם התנעה גדול להנעת מנגנוני עבודה.

הכנסת נגדים מתכווננים במעגל הרוטור של המנוע, הנקראים נגדי התנעה, לא רק מפחיתה את זרם ההתנעה ההתחלתי, אלא במקביל מגדילה את מומנט ההתנעה הראשוני, שיכול להגיע למומנט המרבי Mmax (מקור 1, א, עקומה 3), אם ההחלקה הקריטית של מנוע הרוטור הפתיל שלב
skr = (R2' + Rd') / (X1 + X2') = 1,
כאשר Rd' - התנגדות אקטיבית של הנגד בשלב של פיתול רוטור המנוע, מופחת לשלב של פיתול הסטטור.הגדלה נוספת של ההתנגדות הפעילה של הנגד המתנע אינה מעשית, שכן היא מובילה להיחלשות של מומנט ההתחלה הראשוני וליציאה מנקודת המומנט המקסימלי באזור ההחלקה s> 1, מה שמונע את האפשרות להאיץ את הרוטור.
ההתנגדות הפעילה הנדרשת של הנגדים להפעלת מנוע רוטור פאזה נקבעת על סמך דרישות ההתנעה, שיכולות להיות קלות כאשר Mn = (0.1 - 0.4) Mnom, רגילה אם Mn - (0.5 - 0.75) Mn, וחמורה ב-Mn ≥ אני.
על מנת לשמור על מומנט גדול מספיק עם מנוע רוטור מפותל פאזה במהלך האצה של יחידת ייצור, על מנת להפחית את משך התהליך החולף ולהפחית את חימום המנוע, יש צורך להפחית בהדרגה את ההתנגדות הפעילה של נגדי ההתנעה. שינוי מומנט מותר במהלך תאוצה M (t) נקבע על ידי תנאים חשמליים ומכאניים המגבילים את מגבלת שיא המומנט M> 0.85Mmax, מומנט המיתוג M2 >> Ms (איור 2), כמו גם תאוצה.

אורז. 2. מאפייני התחלה של מנוע אסינכרוני תלת פאזי עם רוטור פצע

הכללת נגדי ההתנעה מובטחת על ידי הכללה רצופה של המאיצים Y1, Y2, בהתאמה, בזמנים t1, t2, שנספרו מרגע התנעת המנוע, כאשר במהלך האצה המומנט M הופך להיות שווה למומנט המיתוג M2. לכן, במהלך כל ההפעלה, כל שיא המומנטים זהים וכל מומנטי המיתוג שווים זה לזה.
מכיוון שהמומנט והזרם של המנוע האסינכרוני עם רוטור נפוץ קשורים זה בזה, ניתן להגדיר את גבול זרם השיא במהלך תאוצת הרוטור I1 = (1.5 - 2.5) Aznom וזרם המיתוג Az2, אשר אמור להבטיח את מומנט המיתוג M2 > M.° C.
ניתוק מנועים אסינכרוניים עם רוטור מפותל מרשת האספקה מתבצע תמיד עם קצר חשמלי של מעגל הרוטור על מנת למנוע הופעת מתחי יתר בשלבי פיתול הסטטור, שיכולים לחרוג מהמתח הנומינלי של שלבים אלה על ידי 3 - 4 פעמים, אם מעגל הרוטור פתוח ברגע שהמנוע נעצר.
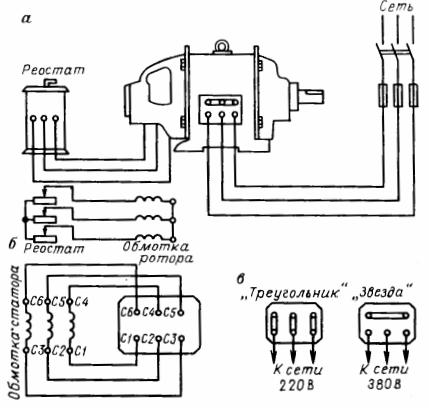
אורז. 3. ערכת חיבור של פיתולי המנוע עם רוטור פאזה: א - לרשת החשמל, b - רוטור, c - על לוח המסוף.
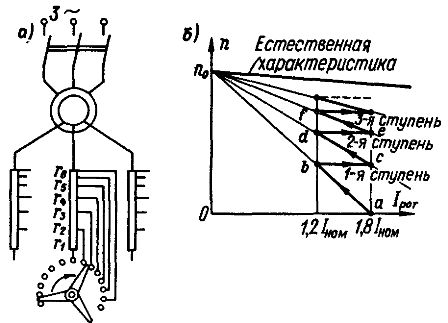
אורז. 4. הפעלת המנוע עם רוטור פאזה: א - מעגל מיתוג, ב - מאפיינים מכניים