מנועי מעבה - מכשיר, עקרון הפעולה, יישום
 במאמר זה נדבר על מנועי קבלים, שהם למעשה מנועים אסינכרוניים רגילים, הנבדלים רק באופן חיבורם לרשת. בואו ניגע בנושא בחירת קבלים, ננתח את הסיבות לצורך בבחירה מדויקת של קיבולת. נציין את הנוסחאות העיקריות שיעזרו להעריך באופן גס את הקיבולת הנדרשת.
במאמר זה נדבר על מנועי קבלים, שהם למעשה מנועים אסינכרוניים רגילים, הנבדלים רק באופן חיבורם לרשת. בואו ניגע בנושא בחירת קבלים, ננתח את הסיבות לצורך בבחירה מדויקת של קיבולת. נציין את הנוסחאות העיקריות שיעזרו להעריך באופן גס את הקיבולת הנדרשת.
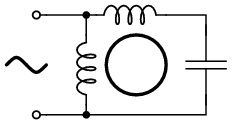
מנוע הקבל נקרא מנוע אסינכרוני, במעגל הסטטור, שבו נכלל קיבול נוסף ליצירת הסטת פאזה של הזרם בפיתולי הסטטור. זה חל לעתים קרובות על מעגלים חד פאזיים כאשר משתמשים במנועי אינדוקציה תלת פאזיים או דו פאזיים.
פיתולי הסטטור של מנוע האינדוקציה מוסטים פיזית אחד מהשני ואחד מהם מחובר ישירות לרשת החשמל, בעוד השני או השני והשלישי מחוברים לרשת באמצעות קבל.הקיבולת של הקבל נבחרת כך שהסטת הפאזה של הזרמים בין הפיתולים תהיה שווה או לפחות קרובה ל-90 מעלות, ואז המומנט המרבי יסופק לרוטור.
במקרה זה, המודולים של האינדוקציה המגנטית של הפיתולים חייבים להתברר זהים, כך שהשדות המגנטיים של פיתולי הסטטור יוזזו זה לזה, כך שהשדה הכולל מסתובב במעגל, ולא ב אליפסה, גוררת איתה את הרוטור ביעילות הגבוהה ביותר.
ברור שהזרם והפאזה שלו בסליל המחובר על פני הקבל קשורים הן לקיבול של הקבל והן לעכבה האפקטיבית של הסליל, שתלויה בתורה במהירות הרוטור.
בעת הפעלת המנוע, עכבת הפיתול נקבעת רק לפי השראות והתנגדות אקטיבית שלו, ולכן היא קטנה יחסית בזמן ההתנעה, וכאן יש צורך בקבלים גדולים יותר כדי להבטיח התנעה מיטבית.
כאשר הרוטור מאיץ למהירות מדורגת, השדה המגנטי של הרוטור יגרום ל-EMF בפיתולי הסטטור, שיכוון כנגד המתח המספק את הפיתול - ההתנגדות האפקטיבית הנוכחית של הפיתול גדלה והקיבול הנדרש יורד.
עם קיבולת שנבחרה בצורה מיטבית בכל מצב (מצב הפעלה, מצב פעולה), השדה המגנטי יהיה מעגלי, וכאן רלוונטיים גם מהירות הרוטור וגם המתח, וגם מספר הפיתולים, והקיבול המחובר לזרם . אם הערך האופטימלי של פרמטר כלשהו מופר, השדה הופך אליפטי והמאפיינים המוטוריים יורדים בהתאם.
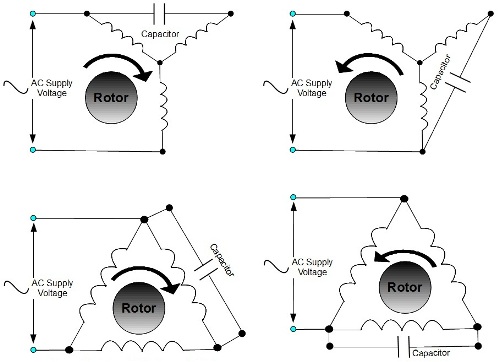
עבור מנועים עם מטרות שונות, סכימות החיבור של הקבל שונות.כשהם משמעותיים מומנט התחלה, השתמש בקבל בעל קיבולת גדולה יותר כדי להבטיח זרם ופאזה מיטביים בעת ההפעלה. אם מומנט ההתחלה אינו חשוב במיוחד, תשומת הלב מוקדשת רק ליצירת תנאים אופטימליים עבור מצב ההפעלה במהירות המדורגת, והקיבולת נבחרת עבור המהירות המדורגת.
לעתים קרובות למדי, עבור התנעה איכותית, משתמשים בקבל התנעה המחובר במקביל לקבל הפעלה בעל קיבולת קטנה יחסית במהלך ההפעלה, כך שהשדה המגנטי המסתובב הוא מעגלי במהלך ההפעלה, ואז ההפעלה הקבל כבוי והמנוע ממשיך לפעול רק כשהקבל פועל. במקרים מיוחדים, קבוצה של קבלים הניתנים להחלפה משמשת לעומסים שונים.

אם קבל ההתחלה לא מנותק בטעות לאחר שהמנוע יגיע למהירות הנקובת, הסטת הפאזה בפיתולים תקטן, לא תהיה אופטימלית והשדה המגנטי של הסטטור יהפוך אליפטי, מה שידרדר את ביצועי המנוע. הכרחי שתבחר את כושר ההתנעה והתפעול הנכונים כדי שהמנוע יפעל ביעילות.
האיור מציג סכימות מיתוג מנועי קבלים טיפוסיות המשמשות בפועל. לדוגמה, שקול מנוע דו-פאזי של כלוב סנאי שלסטטור שלו יש שתי פיתולים כדי לספק שני שלבים A ו-B.
קבל C כלול במעגל של השלב הנוסף של הסטטור, ולכן הזרמים IA ו-IB זורמים בשתי פיתולי הסטטור בשני שלבים. באמצעות נוכחות של קיבול, הסטת פאזה של הזרמים IA ו-IB של 90 מעלות מושגת.
הדיאגרמה הווקטורית מראה שהזרם הכולל של הרשת נוצר על ידי הסכום הגיאומטרי של הזרמים של שני השלבים IA ו-IB. על ידי בחירת הקיבול C, הם משיגים שילוב כזה עם השראות של הפיתולים ששינוי הפאזה של הזרמים הוא בדיוק 90 מעלות.
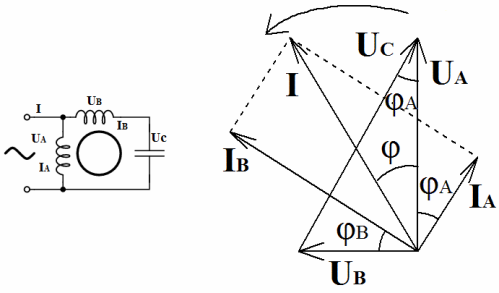
הזרם IA מפגר מאחורי מתח הקו המופעל UA בזווית φA, והזרם IB מפגר מאחורי המתח UB המופעל על המסופים של הפיתול השני ברגע הנוכחי בזווית φB. הזווית בין מתח הרשת למתח המופעל על הסליל השני היא 90 מעלות. המתח על הקבל USC יוצר זווית של 90 מעלות עם הזרם IV.
התרשים מראה שפיצוי מלא של הסטת הפאזה ב-φ = 0 מושג כאשר ההספק התגובתי הנצרך על ידי המנוע מהרשת שווה להספק התגובתי של הקבל C. האיור מציג מעגלים אופייניים להכללת מנועים תלת פאזיים עם קבלים במעגלים המתפתלים של הסטטור.
התעשייה מייצרת היום מנועי קבלים המבוססים על דו פאזי. תלת פאזי משתנה בקלות באופן ידני לאספקה מרשת חד פאזית. ישנם גם שינויים תלת פאזיים קטנים, שכבר מותאמו עם קבל לרשת חד פאזית.
פתרונות אלו נמצאים לרוב במכשירי חשמל ביתיים כגון מדיחי כלים ומאווררי חדרים. משאבות סחרור תעשייתיות, מאווררים וערבים משתמשים לעתים קרובות במנועי קבלים בפעולתם. אם יש צורך לכלול מנוע תלת פאזי ברשת חד פאזי, נעשה שימוש בקבל עם הסטת פאזה, כלומר, המנוע הופך שוב לקבל.

כדי לחשב בקירוב את הקיבולת של קבל, משתמשים בנוסחאות ידועות, שבהן מספיק להחליף את מתח האספקה ואת זרם הפעולה של המנוע, וקל לחשב את הקיבולת הנדרשת עבור חיבור כוכב או דלתא של פיתולים.
כדי למצוא את זרם הפעולה של המנוע, מספיק לקרוא את הנתונים על לוחית השם שלו (הספק, יעילות, קוסינוס phi) וגם להחליף אותם בנוסחה. כקבל התחלתי, נהוג להתקין קבל בגודל כפול מקבל העבודה.

היתרונות של מנועי קבלים, למעשה - אסינכרוני, כוללים בעיקר אחד - האפשרות לחבר מנוע תלת פאזי לרשת חד פאזית. בין החסרונות הם הצורך בקיבולת אופטימלית לעומס ספציפי ואי קבילות של אספקת חשמל מממירי גלי סינוס שונה.
אנו מקווים כי מאמר זה היה שימושי עבורך, ועכשיו אתה מבין מהם קבלים עבור מנועים אסינכרוניים וכיצד לבחור את הקיבולת שלהם.