שרשראות הנעה של מסועים
 המאמר בוחן את תוכניות ההנעה החשמלית של מסועים מסוימים. באיור. 1 מציג תרשים סכמטי של ההנעה החשמלית של קווי מסוע בודדים, שמהירותם חייבת להיות זהה לחלוטין. צורך כזה מתעורר בייצור מתמשך, כאשר מוצרים שונים, לאחר הפעולות הטכנולוגיות הנדרשות בקווים נפרדים, חייבים להיפגש באתר ההרכבה תוך התאמה קפדנית זה לזה.
המאמר בוחן את תוכניות ההנעה החשמלית של מסועים מסוימים. באיור. 1 מציג תרשים סכמטי של ההנעה החשמלית של קווי מסוע בודדים, שמהירותם חייבת להיות זהה לחלוטין. צורך כזה מתעורר בייצור מתמשך, כאשר מוצרים שונים, לאחר הפעולות הטכנולוגיות הנדרשות בקווים נפרדים, חייבים להיפגש באתר ההרכבה תוך התאמה קפדנית זה לזה.
התוכנית מאפשרת לך להתחיל ולעצור בו זמנית מספר קווי מסוע ולהתאים את מהירותם. תנועה מתואמת מושגת על ידי החלפת המנועים לפי ערכת הציר הסינכרוני עם ממיר תדר מהפך משותף. בקרת המהירות של המנועים D1 ו-D2 נעשית על ידי שינוי מהירות המהפך באמצעות תיבת הילוכים P ביחס משתנה.
אישור התחלת מסועים ניתן על ידי מפעילים המפקחים על פעולת מסועים באזורים הקריטיים ביותר. כאשר לחצני המוכנות G1 ו-G2 נלחצים, נורות האותות LS1 ו-LS2 נדלקות והממסרים RG1 ו-RG2 מופעלים. האחרונים מכינים את הממסר להתנעת ה-RP.
כאשר אתה לוחץ על כפתור התחל, ה-RP מופעל, אשר מפעיל את המגע L1. יש סנכרון חד פאזי של מיקום המהפך, D1 ו-D2. לאחר עיכובי זמן, ממסרי מטוטלת המובנים במגעים L1 ו-L2 מפעילים לסירוגין את L2, L1 כבוי ו-LZ. ההתחלה של rheostat של מנוע ממיר התדר מתבצעת על פי עקרון הזמן (ממסרי זמן RU1, RU2, RUZ).
באיור. 2 מציג תרשים של הכונן החשמלי של המדרגות הנעות ברכבת התחתית, המאפשר לך לעבוד על עלייתם ונפילתם של נוסעים. מנוע אסינכרוני עם רוטור פאזה בהספק של עד 200 קילוואט משמש כמנוע הנעה. בשעות מסוימות של היום, עם זרימת נוסעים לא משמעותית, המדרגות הנעות יכולות לעבוד כמעט במצב סרק לאורך זמן.
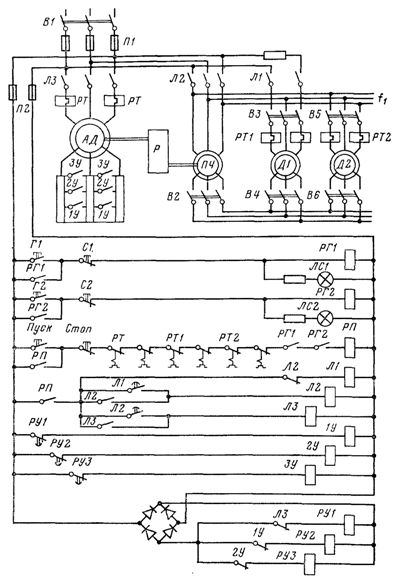
אורז. 1. תכנית ההנעה החשמלית של קווי מסוע עם תנועה מתואמת.
כדי להגדיל את גורם ההספק והיעילות של המנוע, כאשר עומס הציר שלו מופחת לכ-40% מהנומינלי, מתפתלת הסטטור מדלתא לכוכב. ככל שהעומס גדל, הוא חוזר למשולש.
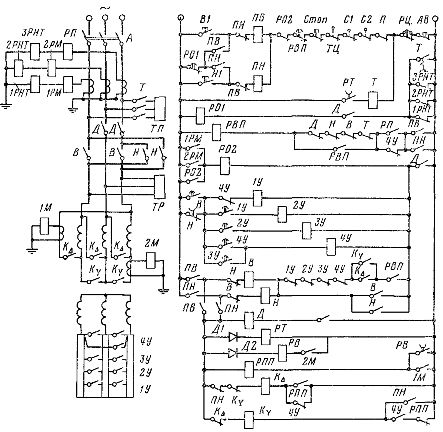
אורז. 2. תכנית ההנעה החשמלית של המדרגות הנעות ברכבת התחתית.
המיתוג האמור נעשה באופן אוטומטי על ידי ממסרי זרם יתר 1M ו-2M, השולטים במגעי k∆ ו-kY דרך ממסרי RPP ו-РВ. מגע ה-RV של עיכוב פתיחה מבטיח את נוכחותו של מעגל סליל ה-RPP בתקופה שבין 2M כבוי ל-1M מופעל.
במצב ירידה בגנרטור עם עומס מלא, המנוע מועמס פחות משמעותית (עקב הפסדים מכניים של המתקן) מאשר בעומס דומה במצב טיפוס.לכן, במצב צניחה, סלילה הסטטור של המנוע תמיד מחוברת לכוכב. המנוע מופעל כפונקציה של זמן באמצעות ממסרי מטוטלת במגעי מאיץ 1U-4U. העצירה היא מכנית. במקרה זה, בלם השירות TP מותקן על ציר המנוע, והבטיחות TP מותקן על ציר ההילוך ההנעה כדי להבטיח שהסולם ייעצר אם החיבור המכני בין הגיר לבין פירי המנוע נשבר.
המעגל מיישם את מנעולי הבטיחות האופייניים שתוארו בסעיף הקודם: מתקלה בחלק המכני של הציוד - הסרת שרשראות ומעקות (מתגי גבול TC, P), הפרה של מבנה השלבים (מתגי גבול C1 ו-C2 ), טמפרטורה מופרזת של המסבים (ממסר תרמי 7), ממהירות יתר (ממסר מהירות צנטריפוגלי RC).
בנוסף, מסופקת הגנת מנוע: מקסימום (ממסר 1RM, 2RM), מעומס יתר (ממסר RP), מאובדן כוח מהמנוע (ממסר זרם אפס 1RNT, 2RNT, 3RNT), מפני ריתוך של מגעי סגירה של מגעי כוח (פתיחת מגעים D,Y,B,T במעגל סליל RVP ו-1U-4U במעגל סליל B).
הגנה מפני אובדן חשמל, התחממות יתר של מסבים ועומס יתר על המנוע פועלת עם השהיית זמן שנקבעת על ידי ממסר הזמן PO1 ו-RVP. כל ההגנות, מלבד ממסר המהירות של השלט הרחוק, עוצרות את המנוע על ידי ניתוקו מהרשת והפעלת בלם השירות TP. רק בתום תהליך הבלימה, לאחר תום ההשהיה של ממסר ה-PT, מופעל בנוסף בלם הבטיחות TP.כאשר ממסר המהירות RC מופעל או כפתור עצירת החירום נלחץ, שני הבלמים מופעלים בו זמנית.