דוגמה לשרטוט תרשים תזמון ותרשים בלוקים של פעולת מנגנונים
בסכימות הבקרה של הקווים הטכנולוגיים, מצב רכיבי הפלט, כלומר. מפעילים (ממסרים אלקטרומגנטיים, סטרטרים מגנטיים, ממסרי מצב מוצק וכו'), נקבעים לא רק על ידי השילוב של רכיבי קלט או קליטה (לחצנים, חיישנים וכו'), אלא גם על ידי רצף השינוי שלהם לאורך זמן.
ניתן להציג תיאור מילולי של התהליך הטכנולוגי המעוצב בצורה של לוח זמנים של שינויים באותות קלט ופלט, אשר נקרא דיאגרמת זמן של התהליך הטכנולוגי.

דוגמה לבניית דיאגרמת תזמון תתבצע על סמך תרשים קו טרום ניקוי גרגרים.
תיאור פעולת המעגל
באמצעות מתג SA1, מצב ההפעלה נבחר: אוטומטי - מצב ההפעלה הראשי, ידני - מצב הפעלה.
מצב ההפעלה מורכב מאספקת חשמל דרך לחצני הנעילה SB4-SB6 לסלילים של המתנעים המגנטיים של המנגנונים הליניאריים, תוך עקיפת כל היגיון הבקרה. במצב זה, המפעיל עצמו מחליט על אורך הקו או מנגנון נפרד כלשהו, השליטה על מילוי ההופר מתבצעת באופן ויזואלי בלבד.
ככלל, אופן פעולה זה משמש גם במצבי פעולה חירום, כאשר לוגיקית הבקרה נשברת ויש צורך להשלים את התהליך הטכנולוגי מבלי לאבד את המוצר על הקו, או במהלך ההפעלה, לאחר תיקון של מנגנון כלשהו. על הקו, יש צורך להתחיל רק אותו, לא את כל המנגנונים הליניאריים.
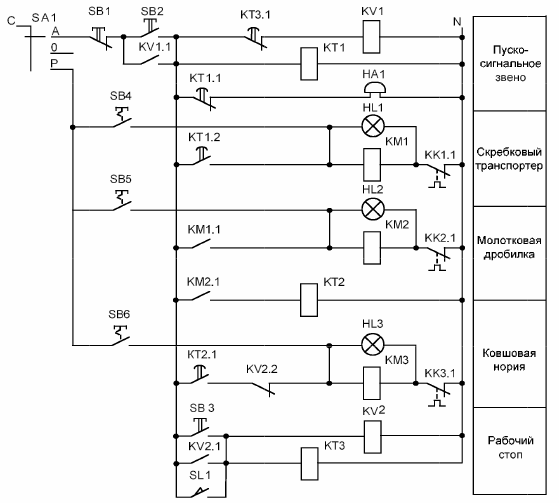
אורז. 1. מעגל שליטה במגע ממסר של קו טרום ניקוי התבואה
לאחר מתג מצב ההפעלה כלול במעגל הבקרה בלוק איתות התנעה, המאפשר, בהשהיית זמן, לכבות בו זמנית את הפעמון ולהפעיל את מסוע המגרד. בעת חיבור מעגלי ממסר ממסר, רצף ההפעלה או כיבוי המנגנונים מתבצע באמצעות מגעי הסגירה של המתנעים המגנטיים.
אז במקרה שלנו, אם יש אנרגיה על הסליל של המתנע המגנטי KM1 (מסוע מגרד), בהתאמה, דרך המגע KM1.1, הכוח יהיה גם על הסליל של המתנע המגנטי KM2 (פטיש).
יחד עם זאת, זה לא מעשי להפעיל את כל המנגנונים של הקו, כי במהלך הפעולה מצב פעולה כזה עלול להתרחש כאשר הכוננים החשמליים של שני מנגנוני הקו עדיין לא הגיעו למצב הפעולה הנומינלי שלהם, והמוצר הוא נמסר להם דרך מנגנון הראש, וכתוצאה מכך עצירת חירום של הקו. לכן, במעגל הבקרה, הספק מסופק לסליל של המתנע המגנטי KM3 של מנגנון הראש עם עיכוב זמן שמתממש על ידי ממסר הזמן KT2.
המנגנונים הליניאריים מופעלים, העבודה בעיצומה. לפעמים במהלך ההפעלה מגיע זמן שבו ההופר עדיין לא מלא ויש לכבות את הקו. במקרה זה, נעשה שימוש בגוש "עצירת עבודה" בסכימת הבקרה, המאפשרת לכבות את כל מנגנוני הקו ברצף הנכון (בכיוון תנועת המוצר לאורך הקו).
אז, כאשר כפתור SB3 נלחץ, ממסר הביניים KV2 נדלק, מגע הפתיחה שלו KV2.2 שובר את המעגל עם סליל KM3, מנגנון ראש הקו כבוי. במקביל, ממסר הזמן KT3 מכין דוח על זמן הפעולה של הקו לניקוי המנגנונים מהמוצר.
לאחר זמן מסוים, המגע של ממסר הזמן KT3.1 שובר את המעגל עם ממסר הביניים KV1, שהמגע שלו עוקף את כפתור ההתחלה. זה גורם לעצירת מעגל הבקרה כולו וכתוצאה מכך לעצור את המנגנונים הליניאריים. אלגוריתם דומה לפעולת מעגל הבקרה בעת הפעלת חיישן הרמה בהופר SL1.
ההגנה על מנועים חשמליים ליניאריים מעומס יתר בתכנית הבקרה המוצגת מתבצעת באמצעות מגעים מפריעים של ממסרים תרמיים KK1.1 ... KK3.1, המותקנים בהתאמה בסדרה במעגלים עם סלילים של סטרטרים מגנטיים KM1 .. .KM3.
לשליטה חזותית על פעולת המנגנונים הליניאריים במעגל הבקרה יש מנורות חיווי HL1 ... HL3. בפעולה רגילה של המנגנונים הליניאריים, נורות החיווי ידלקו. במקרה של כיבוי חירום, הכוח במעגל עם המתנע המגנטי נעלם ונורת החיווי נכבית בהתאם.
על פי הסכימה של מצב הפעולה האוטומטי הראשי החשמלי, דרושים 3 לחצנים לקו ניקוי קדם התבואה: SB1 «עצירה», SB2 «התחל» ו-SB3 «עצירת עבודה», כמו גם חיישן רמה SL1. לכן יש לנו 4 רכיבי קלט. כמו כן, כפתורים מתקבלים עם החזרה עצמית, כלומר. מבלי לתקן את מצב ההפעלה.
דוגמה לבניית תרשים זמן
פריטי פלט 4: פעמון HA1, מסוע מגרד KM1, מגרסה פטישים KM2 ומעלית דלי KM3.
כאשר לוחצים על כפתור "התחל" SB2, יש להפעיל את קישור ההדק הראשון (פעמון HA1) למשך 10 שניות כדי להזהיר את הצוות שקו התהליך עומד להתחיל.
לאחר צלצול הפעמון של HA1, כלומר. 10 שניות לאחר לחיצה על כפתור "התחל" SB2 86, מסוע המגרד KM1 ומגרסת ההשפעה KM2 מופעלים (ראה איור 2).
זמן העבודה של המנגנונים נקבע על פי תפוקתם ונפח הייצור שלהם. התפוקה של מסוע המגרד, מגרסת הפטיש ומעלית הדלי היא 5 ט"ש, 3 ט"ש ו-2 ט"ש בהתאמה. נפח התבואה נקבע מבוסס על נפח ההופר וק"ג תבואה ל-1 מ"ק.
לתבואה של גידולים שונים יש צורה שונה, צפיפות ומשקל מתאים, לכן מטר מעוקב מכל סוג דגן אינו יכול לשקול אותו הדבר.
ניקח את נפח הבונקר 5 מ' התבואה העמוסה היא כוסמת, ששוקלת 560 - 660 ק"ג. המצב הראשוני של סל המיחזור ריק. ואז כמות הדגן במיכל מלא: N = 580 x 5 = 2900 ק"ג.
למעלית הדלי יש את התפוקה הנמוכה ביותר מכל המנגנונים; הוא גם מספק תבואה לקו. זמן העבודה שלו יהיה: Tm3 = 2000/2900 = 0.689 h = 41 דקות.
זמן העבודה של המנגנונים הנותרים יהיה יותר מ-41 דקות והוא נקבע על סמך ההיגיון של המעגל.
לאחר הפעלת מסוע המגרד KM1 ומגרסת הפגיעה KM2, יש לתת להם זמן להאיץ. זמן האצה עבור כל המנגנונים נלקח - 10 שניות. מרים הדלי KM3 מופעל אחרון (10 שניות לאחר הפעלת KM1 ו-KM2) כדי לא ליצור חסימת מוצר על מגרסה הפטישים KM2 ומסוע המגרד KM1. לאחר 41 דקות, כל המוצר הדרוש למילוי הבור יעבור דרך מעלית הדלי KM3.
חיישן מפלס SL מותקן בצורה כזו שאות מילוי ההופר מתקבל עוד לפני ששאריות המוצר עוברות דרך מגרסה הפטישים KM2 ומסוע המגרד KM1.
כאשר חיישן הרמה SL1 מופעל, מנגנון ראש KM3 כבוי (לאחר 41 דקות ו-20 שניות לאחר לחיצה על כפתור SB2 «התחל»). בהשהיית זמן, KM1 ו-KM2 נכבות בו זמנית. ניתן להניח שהשהיית זמן זה שווה ל-20 שניות.
דיאגרמת התזמון לפעולה רגילה מוצגת באיור 2.
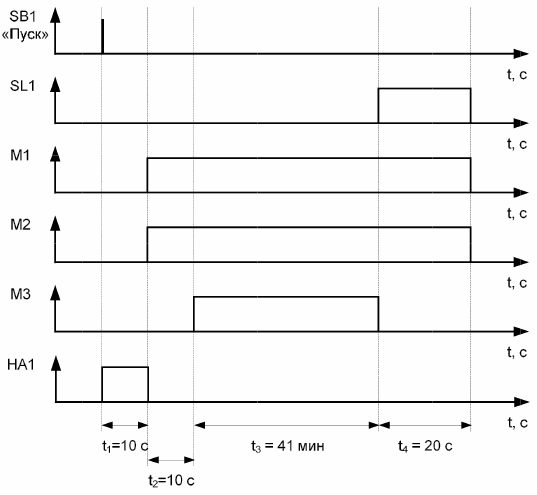
אורז. 2. דיאגרמת תזמון לפעולה רגילה
במצב «הפסקת פעולה», המפעיל יכול לעצור את התהליך לפני הפעלת חיישן הרמה SL1, לכן במקרה זה אי אפשר לקבוע את זמן הפעולה של המנגנונים. במצב "עצירה כללית", כל המנגנונים מושבתים מיד.
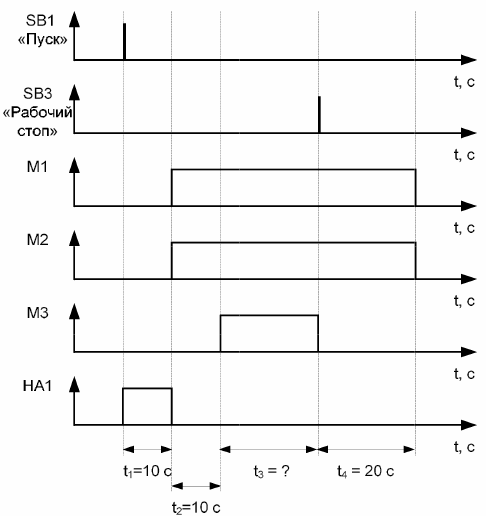
אורז. 3. דיאגרמת תזמון למצב הפעולה "הפסקת פעולה".
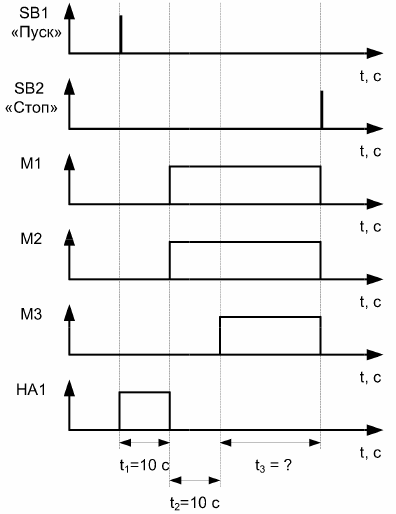
אורז. 4. דיאגרמת תזמון למצב "עצירה כוללת".
דוגמה לבניית תרשים בלוקים של פעולת המנגנונים
תרשים הבלוק של התהליך הטכנולוגי חייב להראות בבירור את האלגוריתם של עבודתו. לשם כך, ייעודים מיוחדים של פעולות מסוימות משמשים.
איור 5 מציג דיאגרמת בלוקים לדוגמה עבור קו ניקוי מקדים של גרגרים. תרשים הבלוק המוצג מציג את כל האפשרויות האפשריות לתפקוד התהליך הטכנולוגי. מצב "תאונה" יכול להתרחש בכל עת במהלך פעולת קו ניקוי קדם התבואה לאחר לחיצה על כפתור "התחל" SB2.
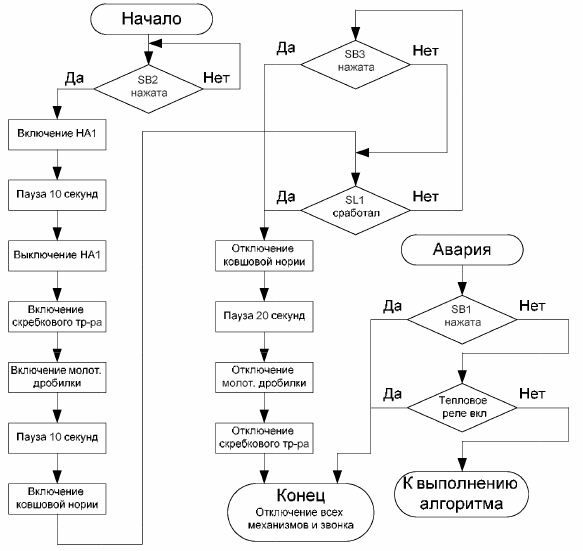
אורז. 5. דיאגרמת בלוקים של קו טרום ניקוי התבואה