מכשירי בקרת מהירות מנוע
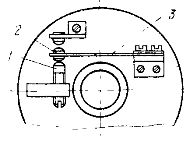
מנועים חשמליים אסינכרוניים נמצאים בשימוש נרחב במעגלי בלמים נגד זרם. ממסר בקרת מהירות אינדוקציה... פיר הכניסה של ממסר 5, עליו מותקן מגנט קבוע גלילי 4, מחובר לציר המנוע החשמלי, שמהירותו הזוויתית יש לשלוט.
כאשר המנוע החשמלי מסתובב, השדה המגנטי חוצה את חוטי הקצר 3 של הסטטור הסיבובי 6. בפיתול מושרה EMF, שערכו פרופורציונלי למהירות הסיבוב הזוויתית של הציר. בהשפעתו מופיע זרם בסליל ומתעורר כוח אינטראקציה, שנוטה לסובב את הסטטור 6 לכיוון סיבוב המגנט.
במהירות סיבוב מסוימת, הכוח גדל כל כך עד שמגביל 2, שמתגבר על ההתנגדות של הקפיץ השטוח, מחליף את מגעי הממסר. הממסר מצויד בשני צמתי מגע: 1 ו-7, המתחלפים בהתאם לכיוון הסיבוב.
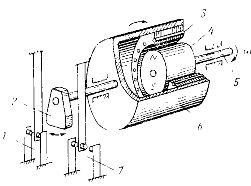
איור 1. ממסר בקרת מהירות אינדוקטיבי
לממסר בקרת מהירות אינדוקציה יש עיצוב מורכב למדי ודיוק נמוך שיכול להיות מקובל רק עבור מערכות בקרה גסות. ניתן להשיג דיוק גבוה יותר של ויסות מהירות על ידי שימוש בטכוגנרטור - מכונת מיקרו מדידה, שהמתח במסופים שלה עומד ביחס ישר למהירות הסיבוב.
גנרטורים של טאצ'ו משמשים במערכות משוב מהירות משתנה עם טווח סל"ד רחב ולכן יש להם שגיאה של אחוזים בודדים בלבד. הנפוצים ביותר הם טכוגנרטורים DC.
באיור. 2 מציג תרשים של ממסר בקרת מהירות למנוע חשמלי M באמצעות טכוגנרטור G, שמעגל האבזור שלו כולל ממסר אלקטרומגנטי K ו-Rheostat ויסות R. כאשר המתח במסופי האבזור של הטכוגנרטור עולה על מתח הפעולה, הממסר מופעל במעגל החיצוני.
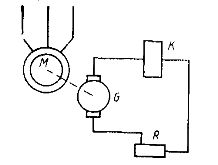
איור 2. ממסר בקרת מהירות עם טכוגנרטור
 איור 3. סכמטי של גשר טכומטר
איור 3. סכמטי של גשר טכומטר
ככל שההתנגדות של מעגל האבזור עולה, הדיוק של המעגל עולה. לכן, לפעמים הממסר מחובר לטכוגנרטור דרך מגבר מוליכים למחצה ביניים. ניתן גם להשתמש ברכיבי סף ללא מגע מוליכים למחצה עם מתח תגובה יציב למטרה זו.
ניתן לשפר את אמינות המעגל אם טכוגנרטור DC יוחלף בטכוגנרטור אסינכרוני ללא מגע.
לטכוגנרטור אסינכרוני יש רוטור חלול שאינו מגנטי העשוי בצורת זכוכית. לסטטור שני פיתולים בזווית של 90 מעלות זה לזה. אחד הסלילים מחובר לרשת זרם חילופין.מתח סינוסואידי מוסר מהפיתול השני, שהוא פרופורציונלי למהירות הרוטור. תדירות מתח המוצא תמיד שווה לתדר של רשת החשמל.
 במנועי DC Executive מודרניים, הטכוגנרטור מובנה באותו בית כמו המכונה והוא מותקן על אותו פיר כמו המנוע הראשי. זה מפחית את אדוות מתח המוצא ומשפר את הדיוק של ויסות המהירות.
במנועי DC Executive מודרניים, הטכוגנרטור מובנה באותו בית כמו המכונה והוא מותקן על אותו פיר כמו המנוע הראשי. זה מפחית את אדוות מתח המוצא ומשפר את הדיוק של ויסות המהירות.
טכוגנרטורים DC מסוג PT-1 עם עירור אלקטרומגנטי נמצאים בשימוש נפוץ במנועים חשמליים מסדרת PBST. מומנט גבוה מנועי DC יש לי טאצ'ו נרגש מגנט קבוע מובנה.
במקרים שבהם למנוע ה-DC M אין טכוגנרטור, ניתן לשלוט במהירות שלו על ידי מדידת EMF האבזור. לשם כך, מעגל גשר טכומטרי משמש, אשר נוצר על ידי שני נגדים: R1 ו-R2, armature Ri וקטבים נוספים של המכונה Rdp. מתח מוצא של גשר טכומטר Uout = U1 — Udp, או
Uout = (Rdp / Rdp + Ri) x E = (Rdp / Rdp + Ri) x cω
השוויון האחרון תקף בתנאי שהשטף המגנטי של המנוע החשמלי הוא קבוע. כולל אלמנט סף במוצא הגשר הטכומטרי, מתקבל ממסר המוגדר למהירות סיבוב זוויתית מסוימת. הדיוק של גשר הטכומטר נמוך בשל השונות של התנגדות מגע המברשת וחוסר איזון החימום של ההתנגדות.
אם מנוע ה-DC פועל על מאפיין מלאכותי והתנגדות נוספת גדולה כלולה באבזור, ניתן לבצע את פונקציית ממסר המהירות על ידי ממסר מתח המחובר למסופי האבזור.
מתח באבזור של המנוע החשמלי Uja = E + IjaRja.
מכיוון ש-I = (U — E) / (Ri + Rext), נקבל Ui = (Rext / (Ri + Rext)) x E + (RI / (Ri + Rext)) x U, אז ניתן להזניח את המונח השני ומתח מסוף האבזור יכול להיחשב כפרופורציונלי ישירות ל-emf ולמהירות הסיבוב של המנוע.
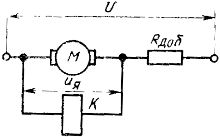
איור 4. בקרת מהירות עם ממסרי מתח
 איור 5. ממסר בקרת מהירות צנטריפוגלי
איור 5. ממסר בקרת מהירות צנטריפוגלי
יש להם עיצוב פשוט מאוד. מתגי מהירות צנטריפוגליים... הבסיס של הממסר הוא לוחית פלסטיק 4, מותקנת על פיר, שמהירות הסיבוב שלו חייבת להיות נשלטת. על הצלחת הקדמית קבועים קפיץ שטוח 3 עם מגע מסיבי 2 ומגע מתכוונן 1. הקפיץ עשוי מפלדה מיוחדת שמודול האלסטיות שלה כמעט בלתי תלוי בשינויי טמפרטורה.
כאשר לוחית החזית מסתובבת, פועל כוח צנטריפוגלי על המגע הנעים, אשר במהירות מסוימת של סיבוב מתגבר על ההתנגדות של הקפיץ השטוח ומחליף את המגעים. זרם מסופק להתקן המגע באמצעות טבעות החלקה ומברשות, שאינם מוצגים באיור. ממסרים כאלה משמשים במערכות ייצוב מהירות עבור מיקרו-מנועי DC. למרות פשטותה, המערכת שומרת על מהירות עם שגיאה בסדר גודל של 2%.
