מעגלי בקרת מנוע כפונקציה של מהירות
 בבקרת מנוע, המהירות מנוטרת כפונקציה של מהירות רוטור המנוע כדי להשפיע על רכיבי הבקרה המתאימים כשהיא משתנה.
בבקרת מנוע, המהירות מנוטרת כפונקציה של מהירות רוטור המנוע כדי להשפיע על רכיבי הבקרה המתאימים כשהיא משתנה.
ניתן להשתמש בממסרי בקרת מהירות או בגנרטורים חשמליים למדידה קטנים במעגלי בקרה להתנעת מנוע. עם זאת, הם משמשים לעתים רחוקות ביותר למטרות אלה בשל מורכבות העיצוב, העלות הגבוהה והאמינות הבלתי מספקת. לכן, מהירות המנוע נשלטת בשיטות עקיפות. במנועים אסינכרוניים וסינכרוניים, תדר הסיבוב נשלט על ידי ה-emf ותדירות זרם הרוטור, ובמנועי זרם ישר על ידי ה-emf armature.
באיור. 1, a ו-b מציגים סכמות להתנעה אוטומטית של מנוע DC מעורר מקבילי בהתאם לתדירות הסיבוב ובהתאם ל-EMF ולמתח האבזור מרגע ההפעלה. בקרת תדירות הסיבוב מתבצעת על ידי מדידת EMF של המנוע, המשתנה ביחס לתדירות הסיבוב.
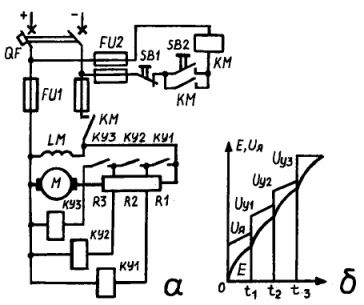
אורז. 1.מעגלי בקרה כפונקציה של מהירות: a ו-b - מעגל ותרשים התחלה של מנוע DC מעורר מקבילי
מכיוון שה-EMF פרופורציונלי למהירות המנוע, הקלט האוטומטי של שלבים בודדים של ריאוסטט ההתנעה מתבצע בגודל מסוים של מתח ההפעלה של המגעים המאיצים KM1, KM2 ו-KMZ, שכל אחד מהם מוגדר לנסיגה מסוימת ערך. על ידי לחיצה על המתנע כפתורים SB2 מדליק את מגע קו ה-KM. כל ההתנגדויות R1, R2, R3 יחוברו בסדרה עם פיתול האבזור ויגבילו את הזרם.
במהירות מסוימת n1, המתח Uy1 של סליל המגע K1 הוא

איפה כאן זהו מקדם המכונה.
כאשר Uy1 יהיה שווה למתח המשיכה, המגע KM1 יפעל ויקצר את ההתנגדות R1. עלייה נוספת במהירות הסיבוב עד לסיבוב של n2 ו-n3 תוביל לעלייה במתח על סלילי המגעים K2 ולקצר חשמלי לערכים


במקרה זה, המגעים K2 והקצר יפעלו בסדרה ויקצרו את ההתנגדויות R2 ו-R3. לאחר קצר בהתנגדות R3, תהליך ההתנעה יושלם והמנוע יכול לפעול לאורך זמן.
EMF במעגל הרוטור של מנוע האינדוקציה הוא פרופורציונלי להחלקה, כלומר E2s = E2s. כאן E2 הוא ה-emf של רוטור נייח.
ככל שההחלקה נמוכה יותר, כך ה-EMF נמוך יותר, כלומר, מהירות רוטור המנוע גבוהה יותר. כדי לשלוט על ההתנעה של מנועי AC עם רוטור מפותל, משתמשים בממסרים השולטים על הערך של EMF במעגל הרוטור.המכשירים המתאימים (ממסרים, מגע) המקצרים התנגדות התחלה מותאמים למתחים הללו.
לשליטה במנועי אינדוקציה עם רוטור פצע ומנועים סינכרוניים, ניתן להשתמש בשיטת התדר גם כפונקציה של מהירות. שיטה זו מבוססת על התלות הידועה של תדירות זרם הרוטור f2 בתדירות הסיבוב של שדה הסטטור n0 והרוטור n2, כלומר.
מכיוון שכל מהירות רוטור מתאימה לערך f2 מסוים, ממסר המוגדר לתדר זה ומחובר למעגל רוטור המנוע יפעל על מעגל סליל המגע. המגע יקצר את שלבי ההתנגדות במהירות נתונה.
בלימה על ידי מנועים מנוגדים נעשית בהתאם למהירות ממסר בקרת מהירות SR. באיור 2, a, b מציגים דוגמאות לעצירת מנועים אסינכרוניים על ידי התנגדות.
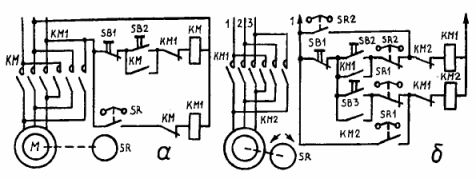
אורז. 2. ערכות עצירת מנועים אסינכרוניים באמצעות התנגדות: א - בלתי הפיך; b - הפיך
בואו נסתכל על איך תוכניות אלה פועלות.
לחיצה על כפתור SB2 מפעילה את סליל המגע KM (ראה איור 2, א), אשר סוגר את מגעי הכוח וחוסם את לחצן SB2. במקביל, המגע של בלוק הפתיחה KM במעגל של סליל מגע הבלמים KM1 וממסר בקרת המהירות SR מנתק אותם מהרשת. כאשר רוטור המנוע מגיע למהירות מסוימת, מגע ה-SR ייסגר, אך זה לא יגרום עוד למגע KM1 לפעול. המנוע ממשיך לפעול כרגיל.
עצירת המנוע באמצעות בלם מתג נגדי מתבצעת על ידי לחיצה על כפתור SB.במקביל, סליל המגע KM מנוטרל, והמגעים העיקריים שלו נעלמים ומנתקים את המנוע מהרשת. מגע הפתיחה של KM במעגל מגע הבלמים של KM1 ייסגר. מכיוון שברגע זה המגע של ממסר בקרת המהירות SR נסגר, המגעים הראשיים של מגע הבלמים מופעלים מיד ופיתול הסטטור מועבר לאחור, השדה המגנטי יתחיל להסתובב בכיוון ההפוך, כלומר. סיבוב הרוטור והמנוע ייעצר על ידי החלפת נגד. מהירות הרוטור יורדת ובערך קטן מסוים המגעים שלו של ממסר בקרת המהירות RKS יפתחו וינתקו את המנוע מהרשת.
במקרה של שליטה לאחור עם בלימה הפוכה (איור 2, ב), המנוע מופעל קדימה על ידי לחיצה על הכפתור SB1, אשר על ידי סגירת מעגל הסליל של מגע KM1, מבטיח שהמנוע מחובר ל- רֶשֶׁת. רוטור המנוע יתחיל להסתובב וכאשר יגיע למהירות מסוימת, מגע הסגירה SR1 של ממסר בקרת המהירות ייסגר ומגע הפתיחה SR2 ייפתח.
הפעלת הסליל של המגע KM2 לא יקרה מכיוון שמגע הפתיחה של המגע KM1 שבר את המעגל שלו. במצב זה, המנוע ימשיך לפעול עד ללחיצה על לחצן SB. כאשר כפתור SB נלחץ, המעגל של סליל KM1 כבוי. זה יסגור את מגע ההפסקה KM1 ומעגל הסליל של המגע KM2 יקבל מתח.
פיתול הסטטור של המנוע ייכנס לאחור. כאשר הרוטור ממשיך להסתובב באותו כיוון על ידי אינרציה, מתרחשת בלימת התנגדות.כאשר המהירות יורדת לערך קטן מסוים, ממסר בקרת המהירות פותח את המגע SR1 שלו, המגע KM2 יכבה וינתק את המנוע מהרשת.
כדי להתניע את המנוע בהילוך אחורי, לחץ על לחצן SB2. התהליך כולו יהיה דומה לזה שתואר. כעת את תפקיד מגע הבלמים ממלא מגע KM1, ומגעי SR2 של ממסר בקרת המהירות ישלטו בתהליך הבלימה.
התנעה אוטומטית של מנוע סינכרוני קשורה לקשיים ידועים, שכן במקרה זה יש צורך לא רק להגביל את זרם ההתחלה, אלא גם לסנכרן את המכונה עם הרשת.
מעגל הבקרה למנוע סינכרוני בהספק נמוך מוצג באיור. 3. הגבלת זרם הפריצה מסופקת על ידי התנגדויות אקטיביות הכלולות בפיתול הסטטור. לפני התנעת המנוע, הפעל את מתגי הכניסה האוטומטיים QF ו-QF1 של רשת ה-AC ו-DC, המספקים הגנה מרבית ותרמית. על ידי לחיצה על כפתור ההתחלה SB2, סליל המגע KM מופעל, ופיתול הסטטור של המנוע הסינכרוני דרך המגעים הראשיים של KM מחובר לרשת דרך נגדי ההתחלה Rn. הסליל ננעל מעצמו והמגע שלו במעגל DC כולל את ממסר הנעילה KV, אשר מגע הסגירה שלו, נסגר, מכין את סלילי המגע K1 ו-K2 להפעלה.
ממסרי התדר KF1 ו-KF2 במעגל העירור של רוטור ה-LM פועלים בהתאם למהירות המנוע. בהתנעה, כאשר החלקת הרוטור היא הגדולה ביותר, נפתחים המגעים המפסקים של הממסרים KF1 ו-KF2.פתיחת הסלילים מתרחשת לפני שהממסר החוסם KV נדלק וסליל K1 לא יקבל חשמל. מגעי ממסר KF1 ו-KF2 ייסגרו שוב כאשר סל"ד המנוע יגיע לכ-60-95% באופן סינכרוני בהתאם לוויסות הממסר.
לאחר סגירת המגעים של הממסר KF1, סליל המגע K1 יידלק, המגעים שלו במעגל הראשי יקצרו את נגדי ההתחלה Rp והסטטור יידלק למתח קו מלא. כאשר המגעים הפתוחים של הממסר KF2 נסגרים, נוצר מעגל המספק את סליל המגע K2, ללא תלות במגע K1, המגע שלו נפתח במהירות של כ-60% מהמהירות הסינכרונית.
למגע K2 יש שתי פיתולים: אחד ראשי, מושך KM1 והשני מפותל KM2, שנועד לשחרר את המנעול, המסופק עם המגע. לאחר הפעלת סליל האיסוף KM1, מגעי הסגירה K2 נסגרים במעגל העירור, ומגעי הפתיחה K2 נפתחים, מנתקים את פיתול הרוטור מנגדי הפריקה R1 ו-R2 ומחברים את הרוטור לרשת DC.
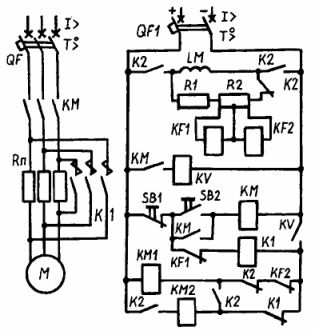
אורז. 3. ערכת בקרת מנוע סינכרונית
המגעים של מגע K2 פועלים בסדר הבא. מגע N/O K2 נפתח במעגל האספקה של סליל האיסוף, אך פעולת החסימה שומרת על אנרגיה במגע. מגעי הסגירה K2 נסגרים במעגל האספקה של שני הסלילים ובמעגל הסליל KM2, מכינים את המעגל להפעלה הבאה. סליל K2 יופסק ברגע שמנגנון הנעילה ישתחרר מסליל KM2. המנוע מנותק מהרשת על ידי לחיצה על כפתור SB1.סליל K1 משחרר את מגע הפתיחה שלו במעגל של סליל KM2, שמשחרר את התפס ומכבה את סליל KM1, ולאחר מכן המעגל חוזר למקומו המקורי.