שיטה אינטואיטיבית לעיצוב סכימות בקרה
 שיטה אינטואיטיבית - שיטה לפיתוח תוכניות בקרה המבוססות על הניסיון שנצבר בארגוני עיצוב שונים באוטומציה של מנגנונים שונים. הוא מבוסס על האינטואיציה ההנדסית של המעצב.
שיטה אינטואיטיבית - שיטה לפיתוח תוכניות בקרה המבוססות על הניסיון שנצבר בארגוני עיצוב שונים באוטומציה של מנגנונים שונים. הוא מבוסס על האינטואיציה ההנדסית של המעצב.
רק מי שספג את כל הניסיון הקודם ויש לו יכולות מסוימות במונחים של עריכת סכמות, שיכול לחשוב בצורה מופשטת ולנמק בהיגיון, יכול לשלוט בצורה מושלמת בשיטה זו. למרות מורכבותה, רוב מעצבי החשמל משתמשים בשיטה האינטואיטיבית באופן נרחב.
לדוגמה, שקול תרשים קינמטי מפושט של ידית דחיפה (איור 1). כאשר הגלגל 5 מסתובב עם כיוון השעון, הידית 4 מסובבת את הידית 1 סביב ציר O, ובכך מאלצת את הנעל 3 עם הידית 2 לתרגם. עם סיבוב נוסף של הגלגל 5, כיוון התנועה של הידית 1 משתנה והנעל חוזרת למצבה המקורי, ולאחר מכן המנוע חייב לעצור.
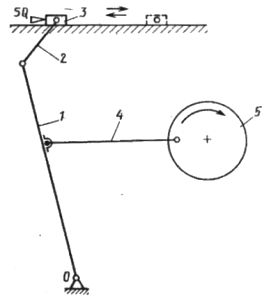
אורז. 1. תרשים סכמטי של בקרת דוחף הידית
המנגנון הנחשב הוא נציג טיפוסי של מכשיר דחיפה.במחזור הראשון, המנגנון פועל ופועל. במידה השנייה זה לא עובד. המחזור שבו המנגנון לא עובד נקרא אפס. למרות שהנעל הולכת הדדית מלאה (קדימה ואחורה), ניתן להשתמש במנוע חשמלי בלתי הפיך להנעה.
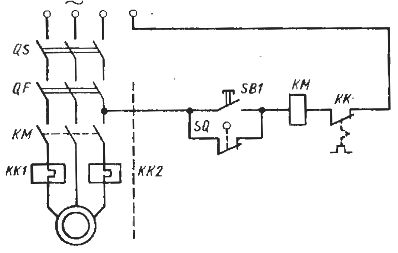
מעגל הבקרה של המנוע החשמלי של מנוף-בוכנה מורכב משני חלקים (באיור 1 הם מופרדים בקו מקווקו): מעגל הכוח ומעגל הבקרה.
שקול את מטרת האלמנטים של מעגל החשמל. זרם תלת פאזי מסופק למתג QS, המנתק את אספקת החשמל למנוע החשמלי במקרה של תיקון או נזק למתנע המגנטי. ואז הזרם זורם דרך המפסק ששחרור ה-QF שלו מוצג בתרשים. הוא נועד להגן ולנתק את אספקת החשמל לכונן במקרה של זרמי קצר חשמלי. המגעים העיקריים של המתנע המגנטי KM מפעילים או מכבים את פיתול המנוע החשמלי M.
ממסרים תרמיים KK1 ו-KK2, שגופי החימום שלהם מוצגים במעגלי החשמל, נועדו להגן על המנוע החשמלי מעומסי יתר ממושכים:
ערכת הבקרה פועלת כדלקמן. כאשר אתה לוחץ על לחצן ההתחלה SB1, הסליל של המתנע המגנטי KM מופעל ולכן המגעים של מעגל האספקה של KM סגורים וזרם חשמלי נכנס לפתלת המנוע. רוטור המנוע מסובב והתוף מתחיל לנוע קדימה. במקביל, הוא מתרחק מהמנוף של מתג הגבול SQ והמגעים שלו סגורים.
כאשר כפתור ההפעלה SB1 משתחרר והמגעים שלו נפתחים, סליל ה-KM של המתנע המגנטי יקבל כוח דרך המגעים של מתג הגבול SQ.לאחר תנועה קדימה ואז אחורה, הבוכנה תלחץ על ידית מתג הגבול SQ, המגעים שלה ייפתחו והסליל של KM יכבה. זה יגרום למגעי KM במעגל החשמל להיפתח ולעצור את המנוע החשמלי.
המעגל הנחשב מכיל מעגלי מתח ובקרה. בעתיד, רק תוכניות בקרה ייחשבו.
לפי פונקציה, כלומר. לפי מטרה, ניתן לחלק את כל האלמנטים המעורבים בפעולת המעגל לשלוש קבוצות: אנשי קשר בקרה, רכיבי ביניים ואלמנטים ביצועיים.
אנשי קשר בקרה הם האלמנטים שאיתם ניתנות פקודות (כפתורי שליטה, מתגים, מתגי גבול, ממירים ראשיים, מגעי ממסר וכו').
עצם השם של מרכיבי הביניים מצביע על כך שהם תופסים עמדת ביניים בין מרכיבי הבקרה והביצועים. במעגלי מגע ממסר, הם כוללים ממסרי זמן וממסרי ביניים, ובמעגלים ללא מגע - שערים לוגיים.
אלמנטים ביצועיים הם מנגנונים ביצועיים. עם זאת, בעת פיתוח מעגלי בקרה, לא נעשה שימוש במנגנוני ההנעה עצמם (מנועים חשמליים או גופי חימום), אלא במכשירים הכוללים אותם, כלומר. סטרטרים מגנטיים, מגעים וכו'.
כל מגעי הבקרה, על פי העיקרון התפקודי שלהם, מחולקים לחמישה סוגים: התחלת מגע עם פעולה קצרה (PC), התחלת מגע עם פעולה ארוכה (PD), הפסקת מגע עם פעולה קצרה (אישור), הפסקת מגע עם פעולה ארוכה (OD ), מגע התחלה-עצירה (תוכנה). אנשי הקשר האלה נקראים הראשיים.
ציקלוגרמות של פעולת כל המגעים האופייניים בבקרת מנגנונים מחזוריים מוצגות באיור. 2.
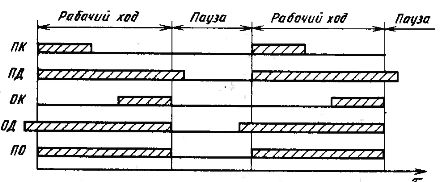
אורז. 2.ציקלוגרמה של אנשי קשר בקרה
כל אחד מחמשת אנשי הקשר מתחיל לעבוד (נסגר) ומסתיים (נפתח) ברגעים ספציפיים בזמן. אז, אנשי ההתחלה מתחילים את עבודתם יחד עם תחילת מהלך העבודה, אך מגע ה-YAK מפסיק לעבוד במהלך מהלך העבודה, OD - במהלך ההפסקה, כלומר, הם שונים זה מזה רק ברגעי הכיבוי ( פתיחה).
עצירת מגעים, שבניגוד למגעים התחלים, מפסיקים לעבוד במקביל לסיום מהלך העבודה, נבדלים ברגעי ההכלה (סגירה). מגע העצירה OK מתחיל את פעולתו במהלך מהלך העבודה, ומגע OD - במהלך ההפסקה. רק המגע של התוכנה מתחיל את עבודתה יחד עם תחילת קורס העבודה ומסתיים בסיומו.
בעזרת חמשת אנשי הקשר העיקריים הנחשבים, ניתן להשיג ארבע סכמות לשליטה באלמנטים מנהלים ורכיבי ביניים, הנקראים סכמות טיפוסיות (איור 3).

אורז. 3. תוכניות בקרה אופייניות למעגלי מנהל ומעגלי ביניים
למעגל הטיפוסי הראשון (איור 3, א) יש רק מגע אחד לבקרת תוכנה. אם הוא סגור, אז זרם חשמלי זורם דרך מפעיל X, ואם הוא פתוח, לא זורם זרם. לאיש הקשר PO יש משמעות משלו ויש להשתמש בכל אנשי הקשר האחרים בזוגות (התחלה ועצירה).
למעגל הטיפוסי השני יש שני מגעי בקרה עם פעולה רציפה: PD ו-OD (איור 3, ב).
המעגל הטיפוסי השלישי מורכב ממגע ההתנעה של המחשב ומקשר העצירה OD, בנוסף למגעי הבקרה, מעגל זה צריך לכלול מגע חוסם x, שדרכו המפעיל X ימשיך לקבל כוח לאחר מגע ההתנעה של המחשב נפתח (איור 3, ג).
הסכימה האופיינית הרביעית מבוססת על שני אנשי קשר קצרי טווח: הפעל מחשב והפסק אישור, מחובר במקביל (איור 3, ד).
ארבעת הסכימות האופייניות הנתונות מאפשרות (כאילו מקוביות) להרכיב סכמות מקבילות-טוריות מורכבות לשליטה במגעים. כך, למשל, תכנית בקרת המנוף הנחשבת (ראה איור 1) מבוססת על התכנית האופיינית הרביעית. הוא משתמש בלחצני הלחיצה SB1 כמגע התחלה לטווח קצר ובמתג גבול SQ כמגע עצירה לטווח קצר.
בעת יצירת ערכת בקרה בשיטה אינטואיטיבית, יש צורך לקבוע נכון את סוג איש הקשר הבקרה, כלומר, משך פעולתו.
שקול דוגמה לפיתוח סכימת בקרה באמצעות שיטה אינטואיטיבית תוך שימוש בסכימות טיפוסיות.
שיהיה צורך לפתח מכשיר חצי אוטומטי לשליטה על משרן ומכשיר להתזת מתקן המיועד לחימום מוצר בזרמים בתדירות גבוהה ולאחר מכן קירורו בסילוני מים. זמן חימום המוצר במשרן הוא 12 שניות וזמן הקירור הוא 8 שעות המוצר מותקן באופן ידני במשרן.
ראשית, ננתח את פעולת המכשיר החצי אוטומטי ונקבע את כל מרכיבי הביצוע והביניים. העובד מתקין את המוצר באופן ידני לתוך המשרן ולוחץ על כפתור ההתחלה.בשלב זה, המשרן נדלק והחימום של המוצר מתחיל. במקביל, ממסר הזמן צריך להידלק, תוך התחשבות בזמן החימום (12 שניות).
ממסר זמן זה (ליתר דיוק, המגעים שלו) מכבה את המשרן ומפעיל את הממטרה, המספקת מים לקירור. במקביל, יש להפעיל ממסר שני כדי לספור לאחור את זמן הקירור, כלומר לכבות את המרסס. בדרך זו, יש צורך לשלוט בארבעה אלמנטים: משרן, מכשיר ריסוס ושני ממסרי זמן.
המשרן מופעל ומכבה באמצעות מגע, וזו הסיבה שיש צורך לשלוט על האחרון. המרסס נשלט על ידי שסתום סולנואיד.
הבה נציין את הסליל (סליל) של המגע KM1, את הסליל של שסתום הסולנואיד KM2 והסלילים של ממסר הזמן KT1 ו-K.T2, בהתאמה. לפיכך, יש לנו שני מפעילים: KM1 ו-KM2 ושני אלמנטים ביניים: KT1 ו-KT2.
מהניתוח שבוצע, עולה כי החימום צריך להתחיל תחילה, כלומר, הסליל KM1 יתרגש. כפתור ההדק SB (פעולה קצרה) משמש כאיש קשר התחלה. לפיכך, או הסכמה האופיינית השלישית או הרביעית ישימה.
תן למשרן להיות מנותק מהמגעים של ממסר הזמן KT1.1, שבמקרה זה הם מגעים ארוכי טווח. לכן, אנו בוחרים את התכנית האופיינית השלישית. במקביל לסלילה של המתנע המגנטי KM1, יש צורך להפעיל את ממסר הזמן KT1, וזה קל מאוד לעשות על ידי חיבורם במקביל.
שקול את פעולת המעגל המתקבל (איור 4, א).
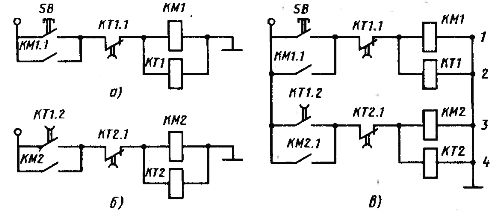
אורז. 4.מעגלי בקרה: א - משרן וממסר לזמן החימום, ב - זמן קירור ממטרות וממסר, ג - התקנה כולה
כאשר אתה לוחץ על לחצן ההתחלה SB, סליל המגע KM1 מופעל, כלומר, החימום של המוצר מתחיל. במקביל, סליל ממסר הזמן KT1 מופעל ומתחיל לספור לאחור את זמן החימום. בעזרת מגע החסימה KM1.1, המתח של הסליל KM1 יישמר גם לאחר שחרור כפתור ההדק SB, כלומר. לאחר פתיחת אנשי הקשר שלו.
לאחר תום זמן החימום, ממסר הזמן KT1 יפעל, הקשר שלו KT1.1 ייפתח. זה יגרום לכיבוי של סליל KM1 (חימום המוצר יסתיים). כעת יש להפעיל את המרסס. ניתן להפעיל אותו על ידי ממסר הזמן KT1 על ידי סגירת המגע. כאשר המרסס מופעל, ממסר הזמן KT1 כבוי. לכן, הקשר הסוגר KT1.1 יהיה קשר לטווח קצר. לכן, נשתמש שוב בסכימה האופיינית השלישית.
במקביל למרסס, יש צורך להפעיל את ממסר הזמן KT2, הסופר לאחור את זמן הקירור. לצורך כך נשתמש בטכניקה המיושמת ונחבר את הסליל של ממסר הזמן KT2 במקביל לסליל KM2. כך אנו מקבלים את ערכת הבקרה השנייה (איור 4, ב). שילוב שני המעגלים (איור 4, a ו-b), אנו מקבלים ערכת בקרה כללית (איור 4, ג).
הבה נבחן כעת את פעולת המעגל כמכלול (איור 4, ג). כאשר אתה לוחץ על לחצן התחל SB, הסלילים של המגע KM1 וממסר הזמן KT1 מופעלים והמוצר מתחיל להתחמם.לאחר 12 שניות, ממסר הזמן KT1 יפעל והמגעים שלו במעגל 1 ייפתחו ובמעגל 2 ייסגרו. המוצר יתחיל להתקרר. במקביל לסליל KM2 של שסתום הסולנואיד, ממסר הזמן K יופעל T2, תוך ספירה לאחור של זמן הקירור. כאשר המגע KT2.1 (מעגל 3) נפתח, השסתום KM2 וממסר הזמן KT2 כבויים, ו המעגל חוזר למיקומו המקורי.
ערכת בקרת המשרן והממטרות שהתקבלה פותחה בשיטה אינטואיטיבית. עם זאת, אין ראיות לכך שתכנית זו תהיה נכונה ואופטימלית. שאלת התפעול של המעגל יכולה להיפתר רק לאחר ייצורו ואימות ניסיוני זהיר. זהו בדיוק החיסרון הגדול ביותר של השיטה האינטואיטיבית. החסרון שצוין נעדר בשיטה האנליטית. השיטה האנליטית לפיתוח סכימות בקרה תידון במאמר הבא.