בקרת מנוע כפונקציה של זרם
 בקרת מנוע יכולה להתבצע בהתאם לעוצמת זרם הסטטור. מעגל ההתנעה כפונקציה של זרם של מנוע אינדוקציה כרוך פצע מוצג באיור. 1 א.
בקרת מנוע יכולה להתבצע בהתאם לעוצמת זרם הסטטור. מעגל ההתנעה כפונקציה של זרם של מנוע אינדוקציה כרוך פצע מוצג באיור. 1 א.
ברגע ההתחלה, הזרם מגיע לערך I1, ולאחר מרווח זמן מסוים הוא יורד לערך I2 (איור ב). בשלב זה חלק מהתנגדות ההתחלה במעגל הרוטור מקוצר אוטומטית, הזרם עולה לערך I1, ואז יורד שוב לערך I2, מה שגורם לקצר של חלק אחר של התנגדות ההתחלה. תהליך זה חוזר על עצמו עד שכל שלבי ההתנגדות ההתחלתית מקוצרים. למטרות אלה, נעשה שימוש בממסר זרם יתר, שפיתוליו כלולים במעגל הכוח של המנוע.
כאשר אתה לוחץ על כפתור התחל SB1 (ראה איור א') מופעל המגע KM, שהמגעים העיקריים שלו מחברים את המנוע לרשת בהתנגדות ההתחלה המשותפת במעגל הרוטור. במקרה זה, הסליל של ממסר KA מקבל כוח, שמגעי הפתיחה שלו נמצאים במעגל של סליל המאיץ K1.ממסר KA מוגדר כך שזמן התגובה קצר מזה של מגע K1. בנוסף, ניתוק המגעים שלו בערך המרבי המותר זרם מתחיל פתוח, וכאשר הזרם יורד לערך המיתוג שלו, הם נסגרים שוב, ובגלל זה סליל K1 מופעל דרך המגעים של הממסר KA ברגע הקצר של שלב ההתנגדות ההתחלתית.
ממסר KA יפעל לפני מגע ההאצה K1 מופעל, והמנוע יאיץ כאשר התנגדות ההתנעה תוכנס במלואה. כאשר זרם המיתוג ההתחלתי יורד, המגעים של ממסר KA ייסגרו והסליל K1 יידלק. במקביל, מגע K1 נסגר, ומספק הפעלה עצמית של הסליל ללא תלות בממסר KA, והמגע במעגל הבקרה נפתח, ומונע הכללה מוקדמת של המאיץ K2.
מכיוון שמגעי האספקה K1 הם חלק מהקצר של התנגדות ההתחלה, זרם הסטטור עולה לערך המרבי והממסר KA, כאשר הוא מופעל, פותח את המגעים שלו במעגל האספקה של סליל K2. כאשר המנוע מגיע למהירות מספקת וזרם הסטטור יורד בחזרה לזרם המיתוג, המגעים של ממסר KA ייסגרו ויפעילו את סליל K2, המקצר את השלב השני של התנגדות ההתנעה למגעיו.
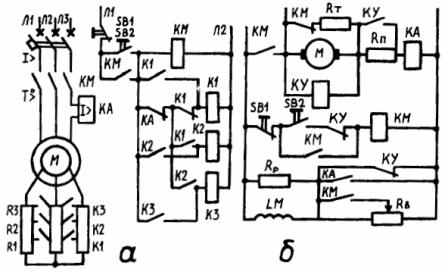
אורז. 1. מעגלי בקרה בהתאם לזרם: א - מנוע אסינכרוני עם רוטור פאזה; ב - מנוע DC עם עירור מקביל
במקרה זה, זרם הסטטור עולה שוב, ממסר KA יפעל ויפתח את המגעים שלו. סליל K2 לא יאבד כוח מכיוון שיהיה לו זמן להיסגר עם מגעי עזר K2.ירידה נוספת בזרם הסטטור לאחר התאוצה הבאה תגרום ל-K3 המתפתל להידלק ולקצר את השלב האחרון של התנגדות ההתחלה. לחיצה על כפתור SB עוצרת את המנוע והמעגל מוכן להתנעה הבאה. באמצעות ממסרי הזרם המוגדרים לחזור בזרם של 12, ניתן לעצור ולהפוך כוננים חשמליים שונים. החיסרון של מעגלי בקרה בפונקציה הנוכחית הוא מספר גדול למדי של אנשי קשר.
לשליטה בלתי הפיכה של מנוע DC נרגש במקביל של מספר קילוואט, ניתן להשתמש בשלב בודד של ריאוסטט ההתחלה (ראה איור ג'). התרשים מציג: התנגדות ויסות RB במעגל העירור; התנגדות פריקה Rp מחוברת במקביל לסליל העירור LM; התנגדות בלימה RT המחוברת במקביל לאבזור M בניתוק מהרשת והתנגדות התחלה RP המחוברת בסדרה למעגל האבזור במהלך תקופת ההתחלה. כדי לייצר שטף מרבי בעת ההפעלה, סליל השדה LM במצב ההתחלתי מופעל במתח מלא.
כאשר כפתור SB2 נלחץ, אבזור המנוע ממגע הקו KM מחובר בסדרה לרשת עם ההתנגדות RP. ממסר בקרת המתנע SC פועל כפונקציה של זרם האבזור. ככל שהזרם גדל, מגע הסגירה של KA מפעיל את ההתנגדות RB, מגביר את השטף המגנטי של עירור, וככל שהזרם יורד, המגע של KA נפתח וסליל ה-LM מחובר בסדרה עם ההתנגדות של ה-Rheostat RB, עקב שהזרם המגנטי יורד.
כאשר המנוע מופעל, זרם האבזור המוגבר מפעיל את ממסר KA וסליל LM יוצר שטף מרבי. כאשר מגיעים למהירות מסוימת, מגע התאוצה K מופעל, התנגדות ההתנעה RP מתקצרת, ולאחר מכן המנוע פועל על פי המאפיינים הטבעיים שלו. כאשר זרם האבזור יורד (כתוצאה מהאצת המנוע) לפני שהממסר KA מופעל, מגע KA במעגל העירור ייפתח.
פיתול LM יופעל בסדרה עם התנגדות RB, מה שיגרום לשטף השדה להיחלש ולזרם האבזור לגדול בהתאם. ממסר KA יפעל שוב, יגדיל את השטף ובו זמנית יגדיל את מהירות המנוע. במהלך האתחול, ממסר החללית מופעל מספר פעמים עד שהמנוע מגיע למהירות שנקבעה על ידי ריאוסטט בקרת RB. התקן רוטט כזה הפועל כפונקציית זרם מפשט את המעגל בהשוואה למעגלי בקרה כפונקציה של זמן.
כאשר המנוע מופעל על ידי לחיצה על כפתור SB1, האבזור מופעל ממגע הפתיחה KM לנגד הבלימה RT והבלימה הדינמית מתבצעת באופן אוטומטי. בתחילת העצירה השדה המגנטי נחלש מעט עקב פתיחת מגע ה-KM על המחוון של ריאוסטט הוויסות, וזרם העירור עובר דרך כל ההתנגדות RB. ככל שמהירות המנוע יורדת עוד יותר, מגע התאוצה K מופסק והשטף גדל כאשר סליל העירור מופעל למתח קו מלא דרך מגע הפתיחה K, וכתוצאה מכך לעלייה במומנט הבלימה.