מנועים אסינכרוניים חד פאזיים ודו פאזיים
מטרה, מכשיר ועיקרון הפעולה של מנועים אסינכרוניים חד פאזיים
מנועי אינדוקציה חד פאזיים הם מכונות בעלות הספק נמוך הדומות בעיצובן למנועי כלוב סנאי תלת פאזיים דומים.
מנועים אסינכרוניים חד-פאזיים שונים ממנועים תלת-פאזיים בסידור הסטטור, כאשר פיתול דו-פאזי ממוקם בחריצים של המעגל המגנטי, המורכב מהשלב הראשי או העבודה עם שטח פאזה של 120 אל. ברד ומוביל לטרמינלים המסומנים C1 ו-C2, ושלב עזר או התחלה עם שטח פאזה של 60 אל. ברד ומוביל לטרמינלים המסומנים B1 ו-B2 (איור 1).
הצירים המגנטיים של שלבים מתפתלים אלו מוסטים זה לזה בזווית 0 = 90 el. בָּרָד. שלב עבודה המחובר לרשת מתח חילופין אינו יכול לגרום לסיבוב של הרוטור, שכן הזרם שלו מעורר שדה מגנטי לסירוגין עם ציר סימטריה קבוע, המאופיין באינדוקציה מגנטית המשתנה באופן הרמוני בזמן.
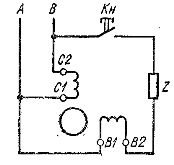
אורז. 1. דיאגרמת מעגלים של מנוע אינדוקציה חד פאזי של כלוב סנאי רוטור.
שדה זה יכול להיות מיוצג על ידי שני מרכיבים - שדות מגנטיים מעגליים זהים ברצף ישיר והפוך, מסתובבים עם אינדוקציות מגנטיות, מסתובבים בכיוונים מנוגדים באותה מהירות. עם זאת, כאשר הרוטור מואץ מראש בכיוון הנדרש, הוא ממשיך להסתובב באותו כיוון כאשר שלב העבודה מופעל.
 מסיבה זו, ההתנעה של מנוע חד-פאזי מתחילה בהאצת הרוטור על ידי לחיצה על כפתור ההתחלה, מה שגורם לעוררות זרמים בשני השלבים של פיתול הסטטור, המוזזים לשלב בכמות בהתאם לפרמטרים של התקן להסטת פאזה Z, עשוי בצורת נגד, משרן או קבל, ורכיבי מעגל חשמלי הכוללים את שלבי ההפעלה וההתחלה של פיתול הסטטור. זרמים אלו גורמים לשדה מגנטי מסתובב במכונה עם אינדוקציה מגנטית במרווח האוויר, המשתנה מעת לעת ומונוטונית בתוך ערכי המקסימום והמינימום, וקצה הווקטור שלו מתאר אליפסה.
מסיבה זו, ההתנעה של מנוע חד-פאזי מתחילה בהאצת הרוטור על ידי לחיצה על כפתור ההתחלה, מה שגורם לעוררות זרמים בשני השלבים של פיתול הסטטור, המוזזים לשלב בכמות בהתאם לפרמטרים של התקן להסטת פאזה Z, עשוי בצורת נגד, משרן או קבל, ורכיבי מעגל חשמלי הכוללים את שלבי ההפעלה וההתחלה של פיתול הסטטור. זרמים אלו גורמים לשדה מגנטי מסתובב במכונה עם אינדוקציה מגנטית במרווח האוויר, המשתנה מעת לעת ומונוטונית בתוך ערכי המקסימום והמינימום, וקצה הווקטור שלו מתאר אליפסה.
זה. השדה המגנטי המסתובב האליפטי מזהה EMF וזרמים בחוטי פיתול הרוטור המקצר, אשר באינטראקציה עם שדה זה מבטיחים את האצת הרוטור של המנוע החד-פאזי בכיוון סיבוב השדה, והוא מגיע למהירות כמעט נומינלית תוך מספר שניות.
שחרור כפתור ההפעלה מעביר את המנוע החשמלי ממצב דו-פאזי למצב חד-פאזי, הנתמך בנוסף על ידי הרכיב המקביל של השדה המגנטי המתחלף, שבמהלך סיבובו מקדים מעט את הרוטור המסתובב עקב החלקה.
ניתוק בזמן של שלב ההתחלה של סלילה הסטטור של מנוע אסינכרוני חד פאזי מרשת החשמל הוא הכרחי בשל התכנון שלו, המספק מצב פעולה לטווח קצר - בדרך כלל עד 3 שניות, אשר אינו כולל את השהות הממושכת שלו. תחת עומס עקב התחממות יתר בלתי מתקבלת על הדעת, שריפת בידוד ונזק.
הגדלת אמינות הפעולה של מנועים אסינכרוניים חד-פאזיים מסופקת על ידי הטמעת במארז המכונה מתג צנטריפוגלי עם מגעים מפריעים המחוברים למסופים המסומנים VT ו-B2 וממסר תרמי עם מגעים דומים בעלי מסומנים PT ו-C1 (איור 2, ג, ד).
המתג הצנטריפוגלי מנתק אוטומטית את שלב ההתחלה של פיתול הסטטור המחובר לטרמינלים המסומנים B1 ו-B2 כאשר הרוטור מגיע למהירות הקרובה למהירות המדורגת, והממסר התרמי מנתק את שני השלבים של פיתול הסטטור מהרשת כאשר החימום הוא גבוה מהמותר.
היפוך של כיוון הסיבוב של הרוטור מושג על ידי שינוי כיוון הזרם באחד משלבי פיתול הסטטור בעת ההפעלה על ידי החלפת כפתור ההתחלה וסידור מחדש של לוחית המתכת על המסופים של המנוע החשמלי (איור. 2, א, ב) או רק על ידי סידור מחדש של שתי לוחות דומים (איור 2, ג, ד).
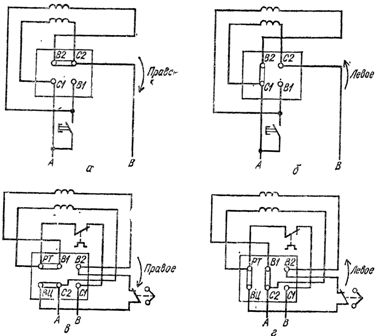
אורז. 2. סימון המסופים של השלבים של סלילה הסטטור של מנוע אסינכרוני חד פאזי עם רוטור סנאי וחיבורם לסיבוב הרוטור: a, c - ימין, b, d - שמאל.
השוואה בין המאפיינים הטכניים של מנועים אסינכרוניים חד פאזיים ותלת פאזיים
מנועים אסינכרוניים חד פאזיים שונים ממכונות תלת פאזיות דומות בהספק מדורג עם מקדם מומנט התחלתי מופחת kn = МХ / Mnom וגורם זרם התחלתי מוגבר ki = Mi / Mnom, המיועדים למנועים חשמליים חד פאזיים עם שלב התחלתי של מתפתל הסטטור עם התנגדות מוגברת של זרם ישר והשראות נמוכה יותר של שלב העבודה חשובים kn - 1.0 - 1.5 ו-ki = 5 - 9.
מאפייני ההתחלה של מנועים אסינכרוניים חד פאזיים גרועים יותר מאלו של מנועים אסינכרוניים תלת פאזיים בשל העובדה ששדה מגנטי מסתובב אליפטי מתרגש בתחילת מכונות חד פאזיות עם שלב ראשוני של פיתול הסטטור שווה ערך לשניים שדות מגנטיים מסתובבים מעגליים לא אחידים - ישירות ולהיפך, גורם לאפקט בלימה.
 על ידי בחירת הפרמטרים של האלמנטים של המעגלים החשמליים של שלב העבודה וההתחלה של פיתול הסטטור, ניתן להבטיח עירור של שדה מגנטי מסתובב מעגלי בעת ההפעלה, מה שאפשר עם אלמנט הסטת פאזה עשוי בצורת קבל בעל קיבולת מתאימה.
על ידי בחירת הפרמטרים של האלמנטים של המעגלים החשמליים של שלב העבודה וההתחלה של פיתול הסטטור, ניתן להבטיח עירור של שדה מגנטי מסתובב מעגלי בעת ההפעלה, מה שאפשר עם אלמנט הסטת פאזה עשוי בצורת קבל בעל קיבולת מתאימה.
מכיוון שההאצה של הרוטור גורמת לשינוי בפרמטרים של מעגלי המכונה, השדה המגנטי המסתובב משתנה מעגול לאליפטי, ובכך פוגע במאפייני ההתנעה של המנוע. לכן, במהירות של כ-0.8 נומינלית, שלב ההתחלה של סלילה הסטטור של המנוע החשמלי כבוי באופן ידני או אוטומטי, וכתוצאה מכך המנוע עובר לפעולה חד פאזי.
למנועים אסינכרוניים חד פאזיים עם קבל התחלה יש כפולה של מומנט ההתחלה הראשוני kp = 1.7 - 2.4 וכפולה של זרם ההתחלה ההתחלתי ki = 3 - 5.
מנועים אסינכרוניים דו פאזיים
במנועים אסינכרוניים דו-פאזיים, שני השלבים של הסטטור מתפתלים עם שטחי פאזה של 90 אל. ברכות הם העובדים. הם ממוקמים בחריצים של המעגל המגנטי של הסטטור, כך שהצירים המגנטיים שלהם יוצרים זווית של 90 אל. בָּרָד. שלבים אלה של סלילה הסטטור נבדלים זה מזה לא רק במספר הסיבובים, אלא גם במתחים ובזרמים מדורגים, אם כי הכוחות הכוללים שלהם זהים במצב המדורג של המנוע.
באחד מהשלבים של סלילה הסטטור יש קבל קבוע Cp (איור 3, א), אשר בתנאי המצב הנומינלי של המנוע מספק עירור של שדה מגנטי מסתובב מעגלי. הקיבולת של קבל זה נקבעת על ידי הנוסחה:
° Cp = I1sinφ1 / 2πfUn2
כאשר I1 ו-φ1- בהתאמה הזרם והפאזה בין המתח והזרם של מעגל הפאזה של מתפתל הסטטור ללא קבל בשדה מגנטי מסתובב מעגלי, I ו-ti - תדירות זרם החילופין והמתח של ההספק רשת, בהתאמה, n- מקדם טרנספורמציה - היחס בין המספר האפקטיבי של סיבובים של השלבים של פיתול הסטטור, בהתאמה עם ובלי קבל, שנקבע על ידי הנוסחה
n = kvol2 w2 / ktom 1 w1
כאשר коб2 ו- коб1 - מקדמי סלילה של השלבים המתאימים של סלילה הסטטור עם מספר הסיבובים w2 ו- w1.
מתח מסוף קבלים Uc מחובר בסדרה עם שלב הפיתול של מנוע אינדוקציה דו-פאזי עם שדה מגנטי מסתובב מעגלי מעל מתח הרשת U ונקבע כדלקמן:
Uc = U √1 + n2
המעבר לעומס מנוע אחר מהנומינלי מלווה בשינוי בשדה המגנטי המסתובב, שבמקום מעגלי הופך אליפטי.זה מחמיר את תכונות העבודה של המנוע, ובעת התנעה זה מקטין את ההתחלה מומנט התחלה ל-MP <0.3Mnom, הגבלת השימוש במנועי קבלים המחוברים באופן קבוע רק במתקנים עם תנאי התחלה מתונים.
כדי להגדיל את המומנט הראשוני, קבל ההתחלה Cn מחובר במקביל לקבל העבודה Cp (איור 3, ב), אשר הקיבולת שלו גדולה בהרבה מהקיבולת של קבל העבודה ותלויה בסט של ההתחלה הראשונית מומנט, שניתן להגדיל לשניים או יותר.
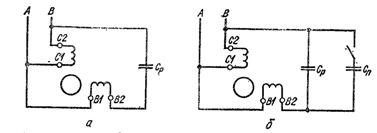
אורז. 3. ערכות להפעלת מנועים אסינכרוניים דו-פאזיים עם רוטור של כלוב סנאי: א - עם קבל מחובר קבוע, ב - עם קבל פועל ומתחיל.
לאחר שהרוטור מאיץ למהירות של 0.6 - 0.7 של קבל ההתחלה הנומינלי, הוא כבוי כדי למנוע מעבר של שדה מגנטי מסתובב מעגלי לאליפטי, מה שמדרדר את פעולת המנוע.
מצב ההתחלה של מנועי קבלים כאלה מאופיין בפרמטרים הבאים: kn = 1.7 - 2.4 ו-ki = 4 - 6.
מנועי קבלים נבדלים במאפייני אנרגיה טובים יותר מאשר מנועים חד פאזיים עם צעיף ראשוני על פיתול הסטטור, ומקדם ההספק שלהם, הודות לשימוש בקבלים, גבוה מזה של מנועים תלת פאזיים באותו הספק.
מנועים אסינכרוניים אוניברסליים
התקנות בקרה אוטומטיות משתמשות במנועים אסינכרוניים אוניברסליים - מכונות תלת פאזיות בעלות הספק נמוך, המחוברות לרשת תלת פאזית או חד פאזית. כאשר הם מופעלים מרשת חד פאזית, מאפייני ההתנעה והתפעול של המנועים גרועים במקצת מאשר בשימוש במצב תלת פאזי.
מנועים אסינכרוניים אוניברסליים מסדרת UAD מיוצרים עם שני וארבעה קטבים, שבמצב תלת פאזי יש הספק נומינלי של 1.5 עד 70 ואט, ובמצב חד פאזי - מ 1 עד 55 וואט ופועלים ממתח לסירוגין רשת מתח בתדר של 50 הרץ עם יעילות η= 0.09 - 0.65.
מנועים אסינכרוניים חד פאזיים עם עמודים מוצללים או מוצללים
במנועי אינדוקציה חד פאזיים עם קטבים מפוצלים או מוצללים, כל מוט מחולק בחריץ עמוק לשני חלקים לא שווים ונושא פיתול חד פאזי המכסה את כל המעגל המגנטי של הקוטב וסיבובים קצרים הממוקמים בחלקו הקטן יותר.
לרוטור של מנועים אלה יש סלילה קצר חשמלי. הכללת הסטטור מתפתל למתח סינוסואידי מלווה בהקמת זרם בו ובעירור של שדה מגנטי לסירוגין עם ציר סימטריה קבוע, המשרה את ה-emf והזרמים המקבילים בלולאות המקוצרות.
בהשפעת זרמי קצר, ה-m.d.s המקבילים מעוררים שדה מגנטי, המונע את התחזקות והיחלשות השדה המגנטי הראשי בקטבים תכופים מסוככים. השדות המגנטיים של החלקים הממוגנים והבלתי מסוככים של הקטבים נמצאים מחוץ לפאזה בזמן, והסטה במרחב, יוצרים את השדה המגנטי המסתובב האליפטי שנוצר בכיוון מהציר המגנטי של החלק הלא מסוכך של הקוטב אל הציר המגנטי. של החלק הממוגן שלו.
האינטראקציה של שדה זה עם הזרמים המושרים בפיתול הרוטור גורמת להופעת המומנט הראשוני Mn = (0.2 - 0.6) Mnom ולהאצת הרוטור למהירות הנקובת, אם מומנט הבלימה המופעל על ציר המנוע לא אמור לחרוג ממומנט ההתחלה.
כדי להגדיל את המומנט ההתחלתי והמומנט המרבי של מנועים אסינכרוניים חד פאזיים עם קטבים מפוצלים או מוצלים, ממוקמים שאנטים מגנטיים של גיליון פלדה בין הקטבים שלהם, המקרבים את השדה המגנטי המסתובב למעגלי.
מנועי עמוד מוצל הם מכשירים בלתי הפיכים המאפשרים התנעות תכופות, עצירות פתאומיות ויכולים להתעכב לאורך זמן. הם עשויים עם הספק מדורג דו וארבעה קוטבי מ-0.5 עד 30 W ועם עיצוב משופר עד 300 W לפעולה מרשת מתח חילופין בתדר של 50 הרץ עם יעילות של ηnom = 0.20 - 0.40.
קרא גם: Selsyns: מטרה, מכשיר, עקרון הפעולה
